
Projekt Speedcopter 150km/h+
- Themenstarter reverser
- Beginndatum
Hach, ich frage mich grade, wie viele rote lampen eben jetzt beim NSA angehen. 
Bombe , Drohne , Alkaida , Heiliger Krieg, Totale Zerstörung
So Jungs (NSA Affen) jetzt wo ich eure Aufmerksamkeit habe.....
f.... euch ins Knie und lernt von den Modellbauern wie Drohnen gebaut werden!!!
Etwas zu Theorie...
Hallo zusammen
Bezgl. Speed Copter habe ich auch einiges lernen müssen.
Bei meinem schnellsten (Horizontal-)Flug war ich mit einem hundskommunen F450, DJI Motoren und ESCs, 4S/3300mAh, Graupner Props, NAZA im Attitude Mode mit Rückenwind auf 97km/h gekommen (gemessen mit FlightZoomer Telemetrie).
Hier mal einige sehr interessante und vielleicht unerwartete Infos bezgl. der Multicopter Flugtheorie:
Es ist also fast völlig egal, welche Motoren, Propeller u.s.w. eingebaut werden. Solange ein Horizontalflug bei hohem Pitchwinkel möglich ist, ist die Antriebskraft ausreichend.
Auf was es an kommt, ist hohe Pitch, hohes Gewicht, wenig Luftwiderstand und viel Abtrieb!! Unglaublich, nicht?
Bei mir waren die Limiten also die 45° Pitch welche NAZA erlaubt (für schnellen manuellen Flug bin ich viel zuwenig geübt) und der Luftwiderstand des F450. Gut war hingegen, dass mein F450 mit dem 4S Akku recht schwer ausgefallen ist und dass der DJI Frame halt aerodynamisch wie ein Klumpen nach unten zieht. Und so habe ich recht ansprechende Speeds erreicht. Im GPS Modus bei nur 35° Pitch immer noch 50..60kmh...
Am Anfang wollte ich einmal den Makel mit dem Abtrieb beheben und habe deshalb Tragflächen montiert, welche im Vorwärtsflug mehr Auftrieb generieren sollten. Ich sage Euch, bei dem Flug war der maximale Speed nur noch etwa 30km/h. Einfach weil die Motoren im Vorwärtsflug kaum mehr arbeiten mussten und deshalb der Schub ebenfalls zusammengebrochen war.
Gruss Martin
Hallo zusammen
Bezgl. Speed Copter habe ich auch einiges lernen müssen.
Bei meinem schnellsten (Horizontal-)Flug war ich mit einem hundskommunen F450, DJI Motoren und ESCs, 4S/3300mAh, Graupner Props, NAZA im Attitude Mode mit Rückenwind auf 97km/h gekommen (gemessen mit FlightZoomer Telemetrie).
Hier mal einige sehr interessante und vielleicht unerwartete Infos bezgl. der Multicopter Flugtheorie:
- Bei gegebenem Pitchwinkel fliegt der Kopter je schneller, je schwerer er ist!
Nehmen wir einmal einen Pitch Winkel von 45° an. Im Horizontalflug entspricht nun der Vorwärtsschub genau der Gewichtskraft des Kopters. D.h. (!) je schwerer der Kopter ist, um so schneller wird er fliegen! Grund: bei einem schwereren Fluggerät müssen die Motoren schneller drehen um die Höhe zu halten und nebenbei ensteht halt auch mehr Schub. - Bei gegebenem Pitchwinkel und Gewicht fliegt der Kopter je schneller, je weniger Widerstand er hat!
Das ist jetzt halbwegs klar und einleuchtend. - Bei gegebenem Pitchwinkel, Gewicht und Lufwiderstand fliegt der Kopter je schneller, je weniger Auftrieb der Frame generiert!!!
Das ist jetzt nun überhaupt nicht klar und einleuchtend. Aber trotzdem wahr!
Ich habe mich immer daran gestört, dass ein simpler DJI F450 Frame von der Aerodynamik her im Vorwärtsflug Abtrieb erzeugt anstatt Auftrieb. Dies wegen dem negativen Anstellwinkel der Oberflächen. Selbst der nach vorn geneigte GPS Teller drückt den Kopter nach unten im Flug. Nun, dies ist zwar schlecht für die Effizienz und die Akkulaufzeit, aber gut für den Maximalspeed!! Denn je mehr Abtrieb die Motoren durch "noch-mehr-hochdrehen" wettmachen müssen, desto mehr Schub in Vorwärtsrichtung...
Es ist also fast völlig egal, welche Motoren, Propeller u.s.w. eingebaut werden. Solange ein Horizontalflug bei hohem Pitchwinkel möglich ist, ist die Antriebskraft ausreichend.
Auf was es an kommt, ist hohe Pitch, hohes Gewicht, wenig Luftwiderstand und viel Abtrieb!! Unglaublich, nicht?
Bei mir waren die Limiten also die 45° Pitch welche NAZA erlaubt (für schnellen manuellen Flug bin ich viel zuwenig geübt) und der Luftwiderstand des F450. Gut war hingegen, dass mein F450 mit dem 4S Akku recht schwer ausgefallen ist und dass der DJI Frame halt aerodynamisch wie ein Klumpen nach unten zieht. Und so habe ich recht ansprechende Speeds erreicht. Im GPS Modus bei nur 35° Pitch immer noch 50..60kmh...
Am Anfang wollte ich einmal den Makel mit dem Abtrieb beheben und habe deshalb Tragflächen montiert, welche im Vorwärtsflug mehr Auftrieb generieren sollten. Ich sage Euch, bei dem Flug war der maximale Speed nur noch etwa 30km/h. Einfach weil die Motoren im Vorwärtsflug kaum mehr arbeiten mussten und deshalb der Schub ebenfalls zusammengebrochen war.
Gruss Martin
Zuletzt bearbeitet:
Äh, wenn man ein Limit von 45° Neigung hat mag das stimmen, aber das ist ja wie wenn man Motorrad mit Stützrädern fährt... damit man in der Kurve nicht über 45° Neigung kommt
Ich würde lieber die Stützräder abmontieren als das Problem mit nem Bleigewicht oder nem dritten Rad am Motorrad zu "beheben"
Ich würde lieber die Stützräder abmontieren als das Problem mit nem Bleigewicht oder nem dritten Rad am Motorrad zu "beheben"
Klar, die 45° sind schon eine grosse Einschränkung wenn der ultimative Speed Kick gesucht wird. Trotzdem sind die Regeln, welche ich beschrieben habe aber allgemeingültig und gelten genauso bei grösseren Winkeln.
Das Problem bei sehr starken Koptern ist, dass bei Vollgas vielleicht bloss 20% der Gesamtleistung für den Auftrieb benötigt wird. Der korrekte Pitchwinkel um die Höhe zu halten, wäre dann 78,46°. Da geht dann sicher die Post ab, bloss bezweifle ich, dass dabei die Höhe sauber gehalten werden kann. Und eine zulässige Speedmessung zählt meiner Meinung nach nur im Horizontalflug. Wenn grosser Speed im Sinkflug auch zählen würde, könnte man auch einfach in 100m Höhe die Motoren abstellen...
Persönlich (für die Anwendung mit FlightZoomer) war ich eben an einem möglichst schnellen und doch stabilen (und zusätzlich auch noch effizienten) horizontalen Marschflug interessiert. Und da haben sich die aufgeführten Prinzipien als absolut zutreffend und relevant erwiesen. Diese Prinzipien sind im Weiteren auch wichtig, wenn es darum geht, die Ausdauer zu optimieren.
Meine erzielten Speed-Ergebnisse (im Horizontalflug notabene) sind im Anbetracht meiner 0815 Hardware auf jeden Fall ordentlich würde ich sagen.
Das Problem bei sehr starken Koptern ist, dass bei Vollgas vielleicht bloss 20% der Gesamtleistung für den Auftrieb benötigt wird. Der korrekte Pitchwinkel um die Höhe zu halten, wäre dann 78,46°. Da geht dann sicher die Post ab, bloss bezweifle ich, dass dabei die Höhe sauber gehalten werden kann. Und eine zulässige Speedmessung zählt meiner Meinung nach nur im Horizontalflug. Wenn grosser Speed im Sinkflug auch zählen würde, könnte man auch einfach in 100m Höhe die Motoren abstellen...
Persönlich (für die Anwendung mit FlightZoomer) war ich eben an einem möglichst schnellen und doch stabilen (und zusätzlich auch noch effizienten) horizontalen Marschflug interessiert. Und da haben sich die aufgeführten Prinzipien als absolut zutreffend und relevant erwiesen. Diese Prinzipien sind im Weiteren auch wichtig, wenn es darum geht, die Ausdauer zu optimieren.
Meine erzielten Speed-Ergebnisse (im Horizontalflug notabene) sind im Anbetracht meiner 0815 Hardware auf jeden Fall ordentlich würde ich sagen.
Wenn grosser Speed im Sinkflug auch zählen würde, könnte man auch einfach in 100m Höhe die Motoren abstellen...
Also die 80° Pitch sind fliegbar, schau mal das hier. Man muss halt mal trainieren, dass man die Höhe nicht durchs Gas regelt, sondern durch den Pitchwinkel.
Wenn man meine Überlegungen weiterspinnt, kommt man auf folgendes Eigenschaften, welche ein ideales HighSpeed Kopter Design ausmachen müssten:
- Das Gewicht ist egal
- Der Luftwiderstand soll absolut minimal sein
- Der Luftwiderstand soll das Minimum beim angestrebten Pitchwinkel haben
- Dazu muss nichts geneigt werden ausser der Body.
- Auftrieb soll der Frame auf keinen Fall erzeugen.
- Anzustreben ist ein Frame, der Abtrieb erzeugt, jedoch ohne zusätzlichen Luftwiderstand zu erzeugen.
- Evtl. mit Leitwerkflächen versehen, da die herkömmliche, Drehzahl-basierte Koptersteuerung bei hohen Pitch Winkeln immer weniger greift.
Das Gerät müsste also sowas wie einen Flunderartigen Center-Bereich haben, der beim Ziel-Pitch-Winkel leicht negativ angestellt im Luftstrom liegt. Zu berücksichtigen ist noch, dass so ein Tragkörper einem Flügel mit extrem geringer Streckung entsprechen würde. Sobald also nennenswerter Abtrieb erzeugt würde, gäbe es erheblichen induzierten Luftwiderstand. Im Zweifelsfall mit dem Abtrieb also zurückhalten agieren.
Das folgende Design würde diese Anforderungen mit 45° Pitch erfüllen; links im Marschflug, rechts beim stationären Flug (wobei das umgekehrte Tragflügelprofil aus den Überlegungen oben wahrscheinlich bereits deutlich zu stark ausgeprägt ist):
Kritisch und zu berücksichtigen wären allenfalls das entstehende starke Moment....
- Das Gewicht ist egal
- Der Luftwiderstand soll absolut minimal sein
- Der Luftwiderstand soll das Minimum beim angestrebten Pitchwinkel haben
- Dazu muss nichts geneigt werden ausser der Body.
- Auftrieb soll der Frame auf keinen Fall erzeugen.
- Anzustreben ist ein Frame, der Abtrieb erzeugt, jedoch ohne zusätzlichen Luftwiderstand zu erzeugen.
- Evtl. mit Leitwerkflächen versehen, da die herkömmliche, Drehzahl-basierte Koptersteuerung bei hohen Pitch Winkeln immer weniger greift.
Das Gerät müsste also sowas wie einen Flunderartigen Center-Bereich haben, der beim Ziel-Pitch-Winkel leicht negativ angestellt im Luftstrom liegt. Zu berücksichtigen ist noch, dass so ein Tragkörper einem Flügel mit extrem geringer Streckung entsprechen würde. Sobald also nennenswerter Abtrieb erzeugt würde, gäbe es erheblichen induzierten Luftwiderstand. Im Zweifelsfall mit dem Abtrieb also zurückhalten agieren.
Das folgende Design würde diese Anforderungen mit 45° Pitch erfüllen; links im Marschflug, rechts beim stationären Flug (wobei das umgekehrte Tragflügelprofil aus den Überlegungen oben wahrscheinlich bereits deutlich zu stark ausgeprägt ist):
Kritisch und zu berücksichtigen wären allenfalls das entstehende starke Moment....
Ok, aber deswegen ja auch die Idee des Threadstarters und einiger anderer hier mit den angewinkelten Motoren. Damit man nicht zuviel Energie an Abtrieb, Gewicht etc. verschenkt sondern mehr in Drehzahl und Pitchwinkel der Props investieren kann.
Ich vermute wenn die hier diskutierten Konzepte gediehen sind, werden diese Speed-Kopter (mit angewinkelten Motoren) vielleicht eine eigene Disziplin darstellen wo die ordinären Copter nix mehr zu suchen haben
(Es geht dann ja tendenziell schon Richtung VTOL bzw. Nuri´s die zufällig vier Motoren haben)
EDIT: Dein Post kam als ich noch am tippen war. Aber hier im Thread wurde ja schon begonnen deinen Ansatz in die Praxis umzusetzen. Außerdem hat Shrediquette den Ansatz ja sogar schon erfolgreich umgesetzt:
https://www.youtube.com/watch?v=7scVGxdGxt4
Ich vermute wenn die hier diskutierten Konzepte gediehen sind, werden diese Speed-Kopter (mit angewinkelten Motoren) vielleicht eine eigene Disziplin darstellen wo die ordinären Copter nix mehr zu suchen haben
(Es geht dann ja tendenziell schon Richtung VTOL bzw. Nuri´s die zufällig vier Motoren haben
)EDIT: Dein Post kam als ich noch am tippen war. Aber hier im Thread wurde ja schon begonnen deinen Ansatz in die Praxis umzusetzen. Außerdem hat Shrediquette den Ansatz ja sogar schon erfolgreich umgesetzt:
https://www.youtube.com/watch?v=7scVGxdGxt4
Zuletzt bearbeitet:
Moin Martin, vielen Dank für deine Überlegungen, ein paar davon teile ich mit dir, dennoch liegst du m.M. nach mit einigen Annahmen daneben, lässt Dinge ausser acht oder hast etwas Interessenkonflikte...
Zunächst muss ich Dodger zustimmen, im Angle/ACC/Atti fliegen ist Fahren mit angezogener Handbremse und eine Messung mit Rückenwind ist auch allein garnicht aussagekräftig.
Es ist also fast völlig egal, welche Motoren, Propeller u.s.w. eingebaut werden. Solange ein Horizontalflug bei hohem Pitchwinkel möglich ist, ist die Antriebskraft ausreichend.
Auf was es an kommt, ist hohe Pitch, hohes Gewicht, wenig Luftwiderstand und viel Abtrieb!! Unglaublich, nicht?
Bei mir waren die Limiten also die 45° Pitch welche NAZA erlaubt (für schnellen manuellen Flug bin ich viel zuwenig geübt) und der Luftwiderstand des F450. Gut war hingegen, dass mein F450 mit dem 4S Akku recht schwer ausgefallen ist und dass der DJI Frame halt aerodynamisch wie ein Klumpen nach unten zieht. Und so habe ich recht ansprechende Speeds erreicht. Im GPS Modus bei nur 35° Pitch immer noch 50..60kmh...
Am Anfang wollte ich einmal den Makel mit dem Abtrieb beheben und habe deshalb Tragflächen montiert, welche im Vorwärtsflug mehr Auftrieb generieren sollten. Ich sage Euch, bei dem Flug war der maximale Speed nur noch etwa 30km/h. Einfach weil die Motoren im Vorwärtsflug kaum mehr arbeiten mussten und deshalb der Schub ebenfalls zusammengebrochen war.
Gruss Martin
Deine Annahmen (Punkt 1 und 3) und das Fazit das du daraus ziehst mag unter der Restriktion deiner maximalen 45° Neigung, deines Rahmens, deines Antriebes zustimmen, das aber so allgemein stehen zu lassen ist schlichtweg falsch, insbesondere wenn die Leistung bzw. das Leistungsgewicht komplett ausser Acht gelassen wird.
Ein Copter kann zwar schneller fliegen als die Strahlgeschwindigkeit die von seinen Props erzeugt wird, wenn es aber um Speed mit entsprechenden Antrieben geht gilt einfach: Je weniger Leistung für den Auftrieb und Widerstand verbraten wird desto mehr steht für den Vortrieb zur Verfügung.
Wenn man Speed will muss es auch beherrschen können, allein schon wegen der Sicherheit, beim F3S fliegen auch keine Anfänger mit! Nachteilig ist allerdings schon das Copter i.d.R. erheblich kompakter als Flugzeuge sind, per FPV geflogen ließe sich der Nachteil aber weitgehend umschiffen.
Wenn du etwas von effizient und schnell schreibst ist das definitiv ein Zielkonflikt
1. Ähh, ernsthaft?
2. und 3. Absolut korrekt
4. Die projizierte Widerstandfläche ist dann aber größer als bei geneigten Motoren
5. Mittels einem geeigneteten Strömungskörpers erzeugter Auftrieb in Höhe der Masse wird allgemein hin als Ideal betrachtet (Flugzeug)
6. Hast du dafür mal ne Formel parat?
7. So ist es für meine Definition kein Copter mehr
Zunächst muss ich Dodger zustimmen, im Angle/ACC/Atti fliegen ist Fahren mit angezogener Handbremse und eine Messung mit Rückenwind ist auch allein garnicht aussagekräftig.
- Bei gegebenem Pitchwinkel fliegt der Kopter je schneller, je schwerer er ist!
Nehmen wir einmal einen Pitch Winkel von 45° an. Im Horizontalflug entspricht nun der Vorwärtsschub genau der Gewichtskraft des Kopters. D.h. (!) je schwerer der Kopter ist, um so schneller wird er fliegen! Grund: bei einem schwereren Fluggerät müssen die Motoren schneller drehen um die Höhe zu halten und nebenbei ensteht halt auch mehr Schub. - Bei gegebenem Pitchwinkel und Gewicht fliegt der Kopter je schneller, je weniger Widerstand er hat!
Das ist jetzt halbwegs klar und einleuchtend. - Bei gegebenem Pitchwinkel, Gewicht und Lufwiderstand fliegt der Kopter je schneller, je weniger Auftrieb der Frame generiert!!!
Das ist jetzt nun überhaupt nicht klar und einleuchtend. Aber trotzdem wahr!
Ich habe mich immer daran gestört, dass ein simpler DJI F450 Frame von der Aerodynamik her im Vorwärtsflug Abtrieb erzeugt anstatt Auftrieb. Dies wegen dem negativen Anstellwinkel der Oberflächen. Selbst der nach vorn geneigte GPS Teller drückt den Kopter nach unten im Flug. Nun, dies ist zwar schlecht für die Effizienz und die Akkulaufzeit, aber gut für den Maximalspeed!! Denn je mehr Abtrieb die Motoren durch "noch-mehr-hochdrehen" wettmachen müssen, desto mehr Schub in Vorwärtsrichtung...
Es ist also fast völlig egal, welche Motoren, Propeller u.s.w. eingebaut werden. Solange ein Horizontalflug bei hohem Pitchwinkel möglich ist, ist die Antriebskraft ausreichend.
Auf was es an kommt, ist hohe Pitch, hohes Gewicht, wenig Luftwiderstand und viel Abtrieb!! Unglaublich, nicht?
Bei mir waren die Limiten also die 45° Pitch welche NAZA erlaubt (für schnellen manuellen Flug bin ich viel zuwenig geübt) und der Luftwiderstand des F450. Gut war hingegen, dass mein F450 mit dem 4S Akku recht schwer ausgefallen ist und dass der DJI Frame halt aerodynamisch wie ein Klumpen nach unten zieht. Und so habe ich recht ansprechende Speeds erreicht. Im GPS Modus bei nur 35° Pitch immer noch 50..60kmh...
Am Anfang wollte ich einmal den Makel mit dem Abtrieb beheben und habe deshalb Tragflächen montiert, welche im Vorwärtsflug mehr Auftrieb generieren sollten. Ich sage Euch, bei dem Flug war der maximale Speed nur noch etwa 30km/h. Einfach weil die Motoren im Vorwärtsflug kaum mehr arbeiten mussten und deshalb der Schub ebenfalls zusammengebrochen war.
Gruss Martin
Ein Copter kann zwar schneller fliegen als die Strahlgeschwindigkeit die von seinen Props erzeugt wird, wenn es aber um Speed mit entsprechenden Antrieben geht gilt einfach: Je weniger Leistung für den Auftrieb und Widerstand verbraten wird desto mehr steht für den Vortrieb zur Verfügung.
Klar, die 45° sind schon eine grosse Einschränkung wenn der ultimative Speed Kick gesucht wird. Trotzdem sind die Regeln, welche ich beschrieben habe aber allgemeingültig und gelten genauso bei grösseren Winkeln.
Das Problem bei sehr starken Koptern ist, dass bei Vollgas vielleicht bloss 20% der Gesamtleistung für den Auftrieb benötigt wird. Der korrekte Pitchwinkel um die Höhe zu halten, wäre dann 78,46°. Da geht dann sicher die Post ab, bloss bezweifle ich, dass dabei die Höhe sauber gehalten werden kann. Und eine zulässige Speedmessung zählt meiner Meinung nach nur im Horizontalflug. Wenn grosser Speed im Sinkflug auch zählen würde, könnte man auch einfach in 100m Höhe die Motoren abstellen...
Persönlich (für die Anwendung mit FlightZoomer) war ich eben an einem möglichst schnellen und doch stabilen (und zusätzlich auch noch effizienten) horizontalen Marschflug interessiert. Und da haben sich die aufgeführten Prinzipien als absolut zutreffend und relevant erwiesen. Diese Prinzipien sind im Weiteren auch wichtig, wenn es darum geht, die Ausdauer zu optimieren.
Meine erzielten Speed-Ergebnisse (im Horizontalflug notabene) sind im Anbetracht meiner 0815 Hardware auf jeden Fall ordentlich würde ich sagen.
Das Problem bei sehr starken Koptern ist, dass bei Vollgas vielleicht bloss 20% der Gesamtleistung für den Auftrieb benötigt wird. Der korrekte Pitchwinkel um die Höhe zu halten, wäre dann 78,46°. Da geht dann sicher die Post ab, bloss bezweifle ich, dass dabei die Höhe sauber gehalten werden kann. Und eine zulässige Speedmessung zählt meiner Meinung nach nur im Horizontalflug. Wenn grosser Speed im Sinkflug auch zählen würde, könnte man auch einfach in 100m Höhe die Motoren abstellen...
Persönlich (für die Anwendung mit FlightZoomer) war ich eben an einem möglichst schnellen und doch stabilen (und zusätzlich auch noch effizienten) horizontalen Marschflug interessiert. Und da haben sich die aufgeführten Prinzipien als absolut zutreffend und relevant erwiesen. Diese Prinzipien sind im Weiteren auch wichtig, wenn es darum geht, die Ausdauer zu optimieren.
Meine erzielten Speed-Ergebnisse (im Horizontalflug notabene) sind im Anbetracht meiner 0815 Hardware auf jeden Fall ordentlich würde ich sagen.
Wenn du etwas von effizient und schnell schreibst ist das definitiv ein Zielkonflikt
Wenn man meine Überlegungen weiterspinnt, kommt man auf folgendes Eigenschaften, welche ein ideales HighSpeed Kopter Design ausmachen müssten:
1. Das Gewicht ist egal
2. Der Luftwiderstand soll absolut minimal sein
3. Der Luftwiderstand soll das Minimum beim angestrebten Pitchwinkel haben
4. Dazu muss nichts geneigt werden ausser der Body.
5. Auftrieb soll der Frame auf keinen Fall erzeugen.
6. Anzustreben ist ein Frame, der Abtrieb erzeugt, jedoch ohne zusätzlichen Luftwiderstand zu erzeugen.
7 .Evtl. mit Leitwerkflächen versehen, da die herkömmliche, Drehzahl-basierte Koptersteuerung bei hohen Pitch Winkeln immer weniger greift.
Das Gerät müsste also sowas wie einen Flunderartigen Center-Bereich haben, der beim Ziel-Pitch-Winkel leicht negativ angestellt im Luftstrom liegt. Zu berücksichtigen ist noch, dass so ein Tragkörper einem Flügel mit extrem geringer Streckung entsprechen würde. Sobald also nennenswerter Abtrieb erzeugt würde, gäbe es erheblichen induzierten Luftwiderstand. Im Zweifelsfall mit dem Abtrieb also zurückhalten agieren.
Das folgende Design würde diese Anforderungen mit 45° Pitch erfüllen; links im Marschflug, rechts beim stationären Flug (wobei das umgekehrte Tragflügelprofil aus den Überlegungen oben wahrscheinlich bereits deutlich zu stark ausgeprägt ist):
Anhang anzeigen 98479
Kritisch und zu berücksichtigen wären allenfalls das entstehende starke Moment....
1. Das Gewicht ist egal
2. Der Luftwiderstand soll absolut minimal sein
3. Der Luftwiderstand soll das Minimum beim angestrebten Pitchwinkel haben
4. Dazu muss nichts geneigt werden ausser der Body.
5. Auftrieb soll der Frame auf keinen Fall erzeugen.
6. Anzustreben ist ein Frame, der Abtrieb erzeugt, jedoch ohne zusätzlichen Luftwiderstand zu erzeugen.
7 .Evtl. mit Leitwerkflächen versehen, da die herkömmliche, Drehzahl-basierte Koptersteuerung bei hohen Pitch Winkeln immer weniger greift.
Das Gerät müsste also sowas wie einen Flunderartigen Center-Bereich haben, der beim Ziel-Pitch-Winkel leicht negativ angestellt im Luftstrom liegt. Zu berücksichtigen ist noch, dass so ein Tragkörper einem Flügel mit extrem geringer Streckung entsprechen würde. Sobald also nennenswerter Abtrieb erzeugt würde, gäbe es erheblichen induzierten Luftwiderstand. Im Zweifelsfall mit dem Abtrieb also zurückhalten agieren.
Das folgende Design würde diese Anforderungen mit 45° Pitch erfüllen; links im Marschflug, rechts beim stationären Flug (wobei das umgekehrte Tragflügelprofil aus den Überlegungen oben wahrscheinlich bereits deutlich zu stark ausgeprägt ist):
Anhang anzeigen 98479
Kritisch und zu berücksichtigen wären allenfalls das entstehende starke Moment....
2. und 3. Absolut korrekt
4. Die projizierte Widerstandfläche ist dann aber größer als bei geneigten Motoren
5. Mittels einem geeigneteten Strömungskörpers erzeugter Auftrieb in Höhe der Masse wird allgemein hin als Ideal betrachtet (Flugzeug)
6. Hast du dafür mal ne Formel parat?
7. So ist es für meine Definition kein Copter mehr
Hi Hi,
da es jetzt ja langsam schön physikalisch hier wird lass ich auch mal meinen Senf ab.
Flightzoomer hat mit seinen aussagen m.E. absolut recht.
Drücken wir es mal formelmäßig aus:
Deine Schubkraft ist ein Vektor welcher sich in die zwei Komponten Auftrieb und Vorschub aufteilt. die Auftriebkomponente ist im Horizontalflug immer F_Auf= m*g+F_Abtrieb wobei F_Abtrieb deine durch die Aerodynamik erzeugte Abtriebskraft ist. Nehmen wir die jetzt mal der Einfachheit als 0 an also F_Auf=m*g.
Die vom Copter erzeugte Schubkraft F_schub = F_Auf/cos(Neigungswinkel) = m*g/cos(Neigungswinkel). Der Vorschub ist dann gegeben durch F_Vorschub=F_schub*sin(Neugungswinkel). Kann man durch eine Skizze schnell sehen (bin grad zu faul die zu machen ). Ineinander eingesetzt ergibt das F_Vorschub=m*g*tan(Neigungswinkel) für Horizontalflug.
Das heisst WENN man es noch schafft Horizontal zu fliegen ist der Vorschub nur von Masse und Neigungswinkel abhängig und je schwerer desto mehr Vorschub. Das gilt nicht nur bis 45° und hat gar nichts mit dem Antrieb zu tun.
Das ist erstmal unintuitiv aber da ist ja noch das große WENN. Das sagt nämlich das man um die Horizontalflugbedingung zu erfüllen m*g/cos(Neigungswinkel) an Gesamtschub bereitstellen muss. Das geht leider für 90° Neigung gegen unendlich.
Abtrieb hilft zusätzlich.
Das Problem bei der Formel ist deshalb das die "je schwerer desto besser" Regel nur solange gilt, wie man noch genug Schub für den Horizontalflug bereitstellen kann.
So genug Klugscheisserei für heute
Grüße
Andreas
Edit: jetzt war ich grad noch 20min fliegen und auf dem Rückweg hab ich nochmal drüber nachgedacht: Es ist sogar so das für die horizontale Beschleunigung a die Masse komplett egal ist da F_Vorschub=m*a=m*g*tan(Neigungswinkel). Da kann man die Masse rauskürzen, d.h. die Beschleunigung ist nur vom Neigungswinkel abhängig (und vom Planeten auf dem man fliegt).
da es jetzt ja langsam schön physikalisch hier wird lass ich auch mal meinen Senf ab.
Flightzoomer hat mit seinen aussagen m.E. absolut recht.
Drücken wir es mal formelmäßig aus:
Deine Schubkraft ist ein Vektor welcher sich in die zwei Komponten Auftrieb und Vorschub aufteilt. die Auftriebkomponente ist im Horizontalflug immer F_Auf= m*g+F_Abtrieb wobei F_Abtrieb deine durch die Aerodynamik erzeugte Abtriebskraft ist. Nehmen wir die jetzt mal der Einfachheit als 0 an also F_Auf=m*g.
Die vom Copter erzeugte Schubkraft F_schub = F_Auf/cos(Neigungswinkel) = m*g/cos(Neigungswinkel). Der Vorschub ist dann gegeben durch F_Vorschub=F_schub*sin(Neugungswinkel). Kann man durch eine Skizze schnell sehen (bin grad zu faul die zu machen
). Ineinander eingesetzt ergibt das F_Vorschub=m*g*tan(Neigungswinkel) für Horizontalflug.Das heisst WENN man es noch schafft Horizontal zu fliegen ist der Vorschub nur von Masse und Neigungswinkel abhängig und je schwerer desto mehr Vorschub. Das gilt nicht nur bis 45° und hat gar nichts mit dem Antrieb zu tun.
Das ist erstmal unintuitiv aber da ist ja noch das große WENN. Das sagt nämlich das man um die Horizontalflugbedingung zu erfüllen m*g/cos(Neigungswinkel) an Gesamtschub bereitstellen muss. Das geht leider für 90° Neigung gegen unendlich.
Abtrieb hilft zusätzlich.
Das Problem bei der Formel ist deshalb das die "je schwerer desto besser" Regel nur solange gilt, wie man noch genug Schub für den Horizontalflug bereitstellen kann.
So genug Klugscheisserei für heute
Grüße
Andreas
Edit: jetzt war ich grad noch 20min fliegen und auf dem Rückweg hab ich nochmal drüber nachgedacht: Es ist sogar so das für die horizontale Beschleunigung a die Masse komplett egal ist da F_Vorschub=m*a=m*g*tan(Neigungswinkel). Da kann man die Masse rauskürzen, d.h. die Beschleunigung ist nur vom Neigungswinkel abhängig (und vom Planeten auf dem man fliegt
).
Zuletzt bearbeitet:
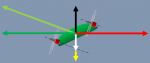
Als Ergänzung zum Post von Andreas nochmals mit Bild.
Also:

So, dass alles gilt wie Andreas geschrieben hat, unabhängig vom Pitchwinkel.
Ich werde anhand der Erkenntnisse heute Abend nochmals am "idealen" Konzept für 80° Pitch werkeln...
Also:
- Die Gewichtskraft (weiss) und muss durch den ebenfalls konstanten Auftrieb (schwarz) stets kompensiert werden.
- Wenn wir jetzt zunehmend den Kopter nach vorn neigen, werden die Motoren hochdrehen (Schub ist hellgrün) um stets eine konstante Kraftkomponente in der Y-Achse (Schwarz = Auftrieb) zu generieren.
- Durch Zerlegung in die X- und Y-Komponenten erkennen wir, dass der Vortrieb (dunkelgrün) dabei rasch zunimmt. Und klar, der Antrieb muss dabei immer mehr leisten können.
- Bei 90° Pitch kann dann mit allem Schub der Welt kein Auftrieb mehr generiert werden.
So, dass alles gilt wie Andreas geschrieben hat, unabhängig vom Pitchwinkel.
Ich werde anhand der Erkenntnisse heute Abend nochmals am "idealen" Konzept für 80° Pitch werkeln...
So, nun lasst und ein paar weitere Überlegungen zu einem optimalen Design anstellen!
Auch ich habe nun begriffen, dass ich mit 45° hier niemanden beeindrucken kann. Obwohl, reverser, Deine Skizze im ersten Post ja genau einen Kopter zeigt, der für 45° Pitch optimiert ist....
Das Prinzip für den schnellstmöglichen Flug scheint also zu sein:
- Power zum abwinken
- Den Kopter näherungsweise mit 90° Pitchwinkel und Vollgas nach vorne werfen
- Die Flughöhe durch Pitchkorrekturen halten
Ok, dann lass uns mal dies als Ausgangslage nehmen und das Konzept für 80°-90° Pitchwinkel optimieren.
Zuerst mal die Frage wegen den geneigten Rotoren. Beim in diesem Thread vorgestellten Kopter wird versucht, den Body in eine strömungsgünstige Position zu bringen, während die Rotoren in eine 80°-90° Lage gebracht werden sollen:
Folgendes können wir nun feststellen:
Kurz gesagt, könnte man das Design meiner Meinung nach deutlich verbessern.
Zuerst mal meine Frage, warum der Body und die Propellerachsen überhaupt so "ungünstig" in ein Verhältnis zueinander gebracht werden muss, das gleichwohl nur ein Kompromiss ist? Warum nicht einfach eine Kreuzbauform und den Akku und die Elektronik in einen Body, der perfekt bei 80°-90° Pitch im Liftstrom liegt?
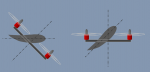
Etwa so:
Auf der Zeichnung sind zwei, in etwa gleichwertige Varianten dargestellt (und nicht etwa ein- und derslebe Kopter, dessen Body beweglich ausgerichtet werden kann).
Links mit perfektem ausgerichtetem Body für einen Flug bei 80° Pitch (der Tropfen weicht mit 10° von der Propellerebene ab). Rechts davon eine Variante, die sogar vollsymmetrisch ist, der Body steht nun genau senkrecht zu der Propellerebene.
Beide Designs fliegen sicher viel schneller, bis der Luftwiderstand den gleichen Wert erreicht, als das Design oben mit geneigten Motoren...
Auch ich habe nun begriffen, dass ich mit 45° hier niemanden beeindrucken kann. Obwohl, reverser, Deine Skizze im ersten Post ja genau einen Kopter zeigt, der für 45° Pitch optimiert ist....
Das Prinzip für den schnellstmöglichen Flug scheint also zu sein:
- Power zum abwinken
- Den Kopter näherungsweise mit 90° Pitchwinkel und Vollgas nach vorne werfen
- Die Flughöhe durch Pitchkorrekturen halten
Ok, dann lass uns mal dies als Ausgangslage nehmen und das Konzept für 80°-90° Pitchwinkel optimieren.
Zuerst mal die Frage wegen den geneigten Rotoren. Beim in diesem Thread vorgestellten Kopter wird versucht, den Body in eine strömungsgünstige Position zu bringen, während die Rotoren in eine 80°-90° Lage gebracht werden sollen:
Folgendes können wir nun feststellen:
- Anders als bei den Beispielen oben ist dieser Kopter nicht neutral bezgl. Auftriebkraft des Frames. Tatsächlich erkennen wir, dass der Body Abtrieb erzeugt (negativ angestellter Körper). Der Abtrieb ist also die gelb dargestellt Kraft.
- Der benötigte Auftrieb (schwarz) muss um den Betrag der gelben Kraft grösser sein.
- Dazu müssen die Motoren dann mehr arbeiten (hellgrün)
- Es entsteht mehr Vorschub (dunkelgrün). Hiermit ist der Effekt des Abtriebes nachgewiesen.
- Somit darf der Widerstand grösser sein, was einer höheren erzielbaren Geschwindigkeit entspricht (der rote Pfeil wächst mit zunehmender Vorwärts-Geschwindigkeit an; sobald der Widerstand aufs gleiche Mass wie der Vorschub angewachsen ist, steigt die Geschwindigkeit nicht mehr).
- Soweit so gut, dieser Kopter wird sicher eine recht hohe Geschwindigkeit erzielen.
- Nun wird es aber haarig. Knacknuss ist der Luftwiderstand von verschiedenen Bauarten und Formen des Frames. Eine strömungsgünstige Bauform wird auf eine viel höhere Geschwindigkeit kommen, bis der Luftwiderstand dem roten Pfeil entspricht.
- Und dieser Body ist trotz der schönen Haube sehr ungünstig. Trotz den geneigten Propellern liegt der Body viel zu schräg im Fahrtwind.
- Damit die Strömung möglichst sauber anliegt, darf als Faustregel ein Flügelprofil nur um wenige Grad von 0° abweichen. Dieser Body ist mit etwa 20° angestellt.
- Auf der Unterseite wird mit grosser Sicherheit ein kompletter Strömungsabriss stattfinden.
- Kurz gesagt: Auf der Polare liegt dieser Flugkörper weit über dem kritischen Anstellwinkel d.h. ab dem kritischen Anstellwinkel nimmt nur noch der Widerstand stark zu während der Auftrieb (Abtrieb in diesem Fall) wieder abnimmt...
- Eine deutliche Verbesserung wäre auf jeden Fall eine zusätzliche Verkleidung der Unterseite (spitzig auslaufend).
- Ein weiterer (Negativ-)Faktor: aufgrund der geneigten Motorachsen, wird der Hebelarm zwischen Schwerpunkt und Motorachse kürzer, was die Steuerung in der Querachse zunehmend schwamig machen dürfte (je mehr die Motoren geneigt würde). Ein 40cm Kopter wird aerodynamisch dadurch zu einem "30cm-Kopter".
- Un noch ein weiterer Faktor: Das Design hat zwar kein Leitwerk, aber durch die längliche Bauform ist das Flugverhalten in der Hochachse sicher nicht neutral. Ein Ausbrechen ist zu erwarten....
Kurz gesagt, könnte man das Design meiner Meinung nach deutlich verbessern.
Zuerst mal meine Frage, warum der Body und die Propellerachsen überhaupt so "ungünstig" in ein Verhältnis zueinander gebracht werden muss, das gleichwohl nur ein Kompromiss ist? Warum nicht einfach eine Kreuzbauform und den Akku und die Elektronik in einen Body, der perfekt bei 80°-90° Pitch im Liftstrom liegt?
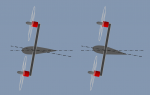
Etwa so:
Auf der Zeichnung sind zwei, in etwa gleichwertige Varianten dargestellt (und nicht etwa ein- und derslebe Kopter, dessen Body beweglich ausgerichtet werden kann).
Links mit perfektem ausgerichtetem Body für einen Flug bei 80° Pitch (der Tropfen weicht mit 10° von der Propellerebene ab). Rechts davon eine Variante, die sogar vollsymmetrisch ist, der Body steht nun genau senkrecht zu der Propellerebene.
Beide Designs fliegen sicher viel schneller, bis der Luftwiderstand den gleichen Wert erreicht, als das Design oben mit geneigten Motoren...
Zuletzt bearbeitet:
Bezüglich Steuerbarkeit hab ich noch ne Idee: Beim Übergang von 0° auf 90° Neigungswinkel verschiebt sich ja quasi die Funktion von Rollen und Gieren, zumindest wenn man bei nahezu 90° Winkel um die Bewegungsrichtung rollen will.
Das könnte man doch in einer "dynamischen Mixtable" berücksichtigen, d.h. die Mixtable wird in abhängigkeit vom Neigungswinkel neu berechnet.
Im Grunde wäre das wie ein Übergang von copterartiger Steuerung auf flächenartige Steuerung.
Grüße
Andreas
Das könnte man doch in einer "dynamischen Mixtable" berücksichtigen, d.h. die Mixtable wird in abhängigkeit vom Neigungswinkel neu berechnet.
Im Grunde wäre das wie ein Übergang von copterartiger Steuerung auf flächenartige Steuerung.
Grüße
Andreas
Die Idee mit dem Mixer ist echt gut.
Ich hätte da auch noch eine Idee.
Der Copter sollte wie schon festgestellt einen möglichst Strömungstechnis neutralen Körper besitzen (Regentropfen Form). In diesem Körper sind die Regler und Akku gelagert. Der Motor Rahmen ist als H ausgelegt. Wobei ich das wörtlich meine. Zwei zum Rumpf parallele Träger die in der Mitte mit einer drehbaren Welle mit dem Rumpf verbunden sind.
Der Rumpf wird nun mit Hilfe eines Servos nun immer in Wage gehalten(Gimbal Steuerung der MultiWii zum Beispiel). Das ganze natürlich so leicht wie möglich und so viel Leistung wie möglich.
Ich hätte da auch noch eine Idee.
Der Copter sollte wie schon festgestellt einen möglichst Strömungstechnis neutralen Körper besitzen (Regentropfen Form). In diesem Körper sind die Regler und Akku gelagert. Der Motor Rahmen ist als H ausgelegt. Wobei ich das wörtlich meine. Zwei zum Rumpf parallele Träger die in der Mitte mit einer drehbaren Welle mit dem Rumpf verbunden sind.
Der Rumpf wird nun mit Hilfe eines Servos nun immer in Wage gehalten(Gimbal Steuerung der MultiWii zum Beispiel). Das ganze natürlich so leicht wie möglich und so viel Leistung wie möglich.
Das Stichwort Regentropfenform ist sicher einmal sehr gut. Und wenn wir uns dereinst dann mal der Schallgeschwindigkeit nähern, wäre es dann der Sears-Haack-body.
Ein H das während dem Highspeed-Flug von vorne zu erkennen wäre, ist sicher nicht gut. Das X hat am wenigsten Material im Wind. Mit dem Regentropfenbody, der von vorne im Highspeedflug dann nur als kleiner Punkt im Zentrum in Erscheinung tritt. So gross muss der Tropfen gar nicht sein. Im wesentlichen sollte der Akku und die Elektronik einfach senkrecht zum Frameangeordnet werden.
Warum sollte der Rumpf bei tiefen Geschwindigkeiten überhaupt exakt in der Strömung liegen? Beim Start stände der Tropfen halt senkrecht, bei 30kmh mit 70°, bei 70kmh mit 40° und bei 150kmh dann waagrecht. Die exakte Ausrichtung mit der Strömung ist ja nur bei maximalem Speed wichtig. Meiner Meinung nach bringen alle Ansätze mit beweglichen Strukturen rein gar nichts bezgl. Maximalspeed. Das einzige, was sie bringen sind ein paar gesparte mAh im Akku während der Beschleunigung zwischen vielleicht 50kmh und 100kmh.
Der Motor Rahmen ist als H ausgelegt. Wobei ich das wörtlich meine. Zwei zum Rumpf parallele Träger die in der Mitte mit einer drehbaren Welle mit dem Rumpf verbunden sind.
Der Rumpf wird nun mit Hilfe eines Servos nun immer in Wage gehalten(Gimbal Steuerung der MultiWii zum Beispiel). Das ganze natürlich so leicht wie möglich und so viel Leistung wie möglich.

