
MiniAPM V3.1 - APM in 35x35
- Themenstarter MaxWin
- Beginndatum
Uuuuups, war wohl doch keine so gute Idee mir die MiniAPM zu bestellen.
Alleine wenn ich das Wort "Vibrationsentkopplung" und "Höhenflüge" lese bekomme ich schon tendenziell Brechreiz.
Alleine wenn ich das Wort "Vibrationsentkopplung" und "Höhenflüge" lese bekomme ich schon tendenziell Brechreiz.
Bin jetzt insgesamt doch recht positiv überrascht. Die Inbetriebnahme der APM ging erstaunlich problemlos, jetzt mal abgesehen von den üblichen "Kleinigkeiten" (tendenziell aber eher selbstverschuldet
") ). Auch bei den Erstflügen (mit den Standard PID-Werten) hat sich der Kopter "gut geschlagen".
). Auch bei den Erstflügen (mit den Standard PID-Werten) hat sich der Kopter "gut geschlagen".Hatte da Horrorvisionen von unzähligen Parametern, die ich in nächtelanger Kleinarbeit und stundenlangen Probeflügen "erkämpfen" muss.
Ist natürlich nicht perfekt, aber für quasi out-of-the-box (noch ohne Autotune & Co.) wirklich erstaunlich gut!
Achja, habe natürlich den "Vibrationstest" gemacht. Muss dazu sagen, dass ich prinzipiell keine Props (und schon gar keine Motoren) wuchte. Verwende allerdings relativ hochwertige Hardware, wie T-Motoren.
AccX/Z waren im Bereich von -1 bis 1 (einzelne Peaks bei -2 bis 2) und AccZ im Bereich von -11 bis -9 (halt um die -10 rum
). Zumindest laut APM-Doku sollte das gut "im grünen Bereich" liegen.Bin dann mal gespannt wie sich die Sache so weiter entwickelt, wenn die PIDs optimiert sind und es ans Testen vom GPS geht.
Bye-bye
BaerBalu
Und dran denken: Wenn AltHold, dann muss der Baro licht- und windgeschützt sein. Deshalb hab ich mir auch ein passendes Gehäuse zum MiniAPM (von Witespyquads) dazubestellt, dann ist es nicht ganz so hässlich. Oder halt, für die "Dübelvariante", eine Abdeckplatte drüber, sodass man den Schaumstoff zwischen APM und Platte quetschen kann.
Ja ist richtig, aber durch die "dicken" Elemente steigt auch der Leitungswiderstand. Der Kollege soll mal was für 1, max. 2A und 10-50V max. Strom raussuchen (zB Schottky DO41, 20V, 1A)!
... und wenn du gerade beim Kollegen bist, soll er gleichmal am Labornetzteil dein Meßgerät überprüfen!
... und wenn du gerade beim Kollegen bist, soll er gleichmal am Labornetzteil dein Meßgerät überprüfen!
Zuletzt bearbeitet:
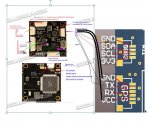


Hier sieht man, woher man die 3,3V bekommt:
http://fpv-community.de/showthread....1-APM-in-35x35&p=659107&viewfull=1#post659107
http://fpv-community.de/showthread....1-APM-in-35x35&p=659107&viewfull=1#post659107


