
AUAV-X2 - Ein echter, kompat. Mini PIXHAWK aus Bulgarien!
- Themenstarter gervais
- Beginndatum
Deinen Ansatz habe ich verstanden. Tu mir bitte dennoch einfach den Gefallen und poste mal ein Bild, wie das beim Rigol bei 7V Input am X2 aussieht.
Ich habs geschafft !
Hier mein Adapter zum Drotek GPS für den Anschluss an Pixhawk oder APM.
Compass wird ebenso angeschlossen, aber nur mit 2 Adern.

Erste Beurteilung:
Das GPS zeigt in der Wohnung mehr Satelliten an als mein China GPS (10 stat 6), die Position springt aber ziemlich auf der Karte (~20m).
Der Compass reagiert schneller im Missionplanner.
Werde es morgen mal genauer testen.
Wo ist eigentlich vorne an dem Modul ?
Da ist nichts gekennzeichnet.
Meiner Meinung nach müßte es in dem Bild die rechte Kante sein ?!?
Wer weiß was genaueres?
Hier mein Adapter zum Drotek GPS für den Anschluss an Pixhawk oder APM.
Compass wird ebenso angeschlossen, aber nur mit 2 Adern.
Erste Beurteilung:
Das GPS zeigt in der Wohnung mehr Satelliten an als mein China GPS (10 stat 6), die Position springt aber ziemlich auf der Karte (~20m).
Der Compass reagiert schneller im Missionplanner.
Werde es morgen mal genauer testen.
Wo ist eigentlich vorne an dem Modul ?
Da ist nichts gekennzeichnet.
Meiner Meinung nach müßte es in dem Bild die rechte Kante sein ?!?
Wer weiß was genaueres?
für Laien: schlechtes Design?
Grundsätzlich hat fly-seb aber recht, wenn er sagt, je sauberer desto besser.
@Hobby:
1.Indoor "Tests" sind witzlos.. Unter freiem Himmel betreiben, dann hüpft es auch nicht mehr.
2: Zu Wer weiß genaueres...ich habe da ein hübsches Bild gemacht, das dürfte hier 10x gepostet worden sein...irgendwo in meinen Beiträgen, Anschlüsse, Ausrichtung, Einstellung im MP.
Zuletzt bearbeitet:
Nein, eine These. Soweit ich sehe, hat sich Nick an die TI Application Notes gehalten. In der Praxis habe ich bislang auch mit der Versorgung von Telemetry / GPS /RX im Buck Betrieb noch keine Probleme gehabt. Spannend wäre es zu sehen, wie der PIXHAWK ans fly-sebs Rigol aussieht.
Das Problem sehe ich eher daher wenn sich mehrere Systeme über die VCC beinflussen und es dann bei einem der vielen Prozessoren (ESC, RC-Empfänger, Telemetrie...) einen Brown Out reset gibt. Dann ist wieder mal ein Copter abgestürzt und keiner weis warum.
Das gilt es zu verhindern. Deshalb gibt es zb. die Leitungsgebundene Messungen bei den EMV Tests. Da wird gemessen wie weit eine Schaltung Rückwärts in die Betriebsspannung stört.
zb. ist einer der Grenzwerte für Störungen 66dBuV, das sind 2.8mV, einige China Regler die ich gemessen habe hatte um 88..90 dBuV -> 35mV.
Sprich der China Regler stört 10x mehr als erlaubt.
Das ist einfach der Grund dafür das man etwas Sorgfalt walten lassen sollte wenn man empfindliche Messtechnik (GPS, Kompass, GYRO) mit Leistungselektronik verschaltet.
Wenn ich mal etwas Zeit habe kann ich den Flight Controller ja mal an den Spektrum Analyzer hängen.
Wie ich schrieb, grundsätzlich hast Du recht. Die Ursachen für Brownouts die ich so in Vivo erleben durfte, waren aber trivialer: 7805 im ESC in den thermal shutdown, gegrillter 3.3V LDO beim APM... Ich empfehle reglerseitig auch nur das, was ich selbst lange ausfallfrei im Betrieb hatte.
PS: Ich bin mir sicher, dass Du auch ein paar praktische (bzw. Kauf-) Empfehlungen in Hinblick auf Deinen Vortrag hast. Man kauft immer gerne, was berufen empfohlen wird.
PS: Ich bin mir sicher, dass Du auch ein paar praktische (bzw. Kauf-) Empfehlungen in Hinblick auf Deinen Vortrag hast. Man kauft immer gerne, was berufen empfohlen wird.
Hallo,
da hat fly-seb mit seinem Hinweis, mich in meiner Fertigstellung wieder mal voll mental gebremst... ..ach, man...
..ach, man...
Versuche einen kleinen Kraftzwerg im inkl. all Dress endlich fertigzustellen. Der zur Verfügung stehende Platz für all die netten Komponenten, war und wird nun vermutlich von neuem, eine echte Herausforderung. Manchmal wünschte ich mir, einer wie unser "Frickler" zu sein... was da sichtbar gezaubert wird ist Mega... genug Offtopic...
Macht es nun wirklich Sinn, neu die Stromzuführung für die Komponenten nicht über die FC sondern über BEC's zu versorgen? Da bin ich schon über den weiteren Input dankbar und auch gespannt, wenn da wie von fly-seb offeriert noch mehr zu diesem Thema kommt.
Btw. - Die M8N ist nun wieder lieferbar... nur wie lange..
http://www.drotek.fr/shop/fr/index.php?id_product=613&controller=product&id_lang=2
Beste Grüsse, Terry
da hat fly-seb mit seinem Hinweis, mich in meiner Fertigstellung wieder mal voll mental gebremst...
..ach, man...Versuche einen kleinen Kraftzwerg im inkl. all Dress endlich fertigzustellen. Der zur Verfügung stehende Platz für all die netten Komponenten, war und wird nun vermutlich von neuem, eine echte Herausforderung. Manchmal wünschte ich mir, einer wie unser "Frickler" zu sein... was da sichtbar gezaubert wird ist Mega
... genug Offtopic...Macht es nun wirklich Sinn, neu die Stromzuführung für die Komponenten nicht über die FC sondern über BEC's zu versorgen? Da bin ich schon über den weiteren Input dankbar und auch gespannt, wenn da wie von fly-seb offeriert noch mehr zu diesem Thema kommt.
Btw. - Die M8N ist nun wieder lieferbar... nur wie lange..
http://www.drotek.fr/shop/fr/index.php?id_product=613&controller=product&id_lang=2
Beste Grüsse, Terry
Nun mal keine Panik. So schlecht ist das auch nicht. Die normalen billig BEC aus China die meist benutzt werden sind meist noch um Faktor 10 schlechter.
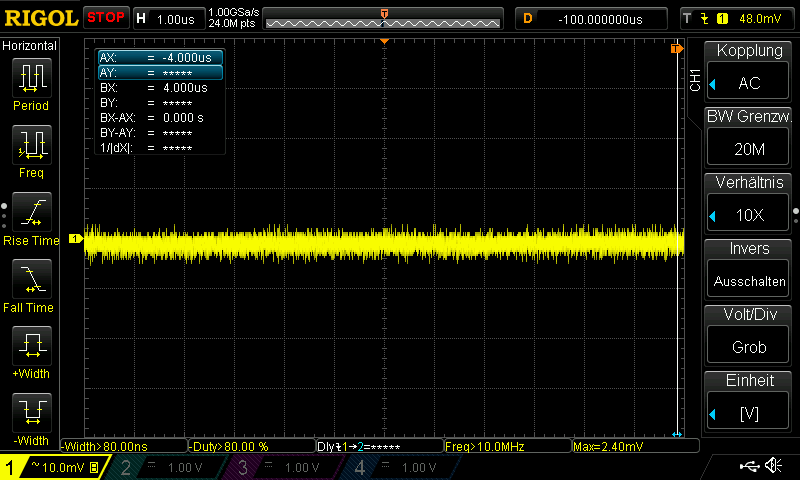
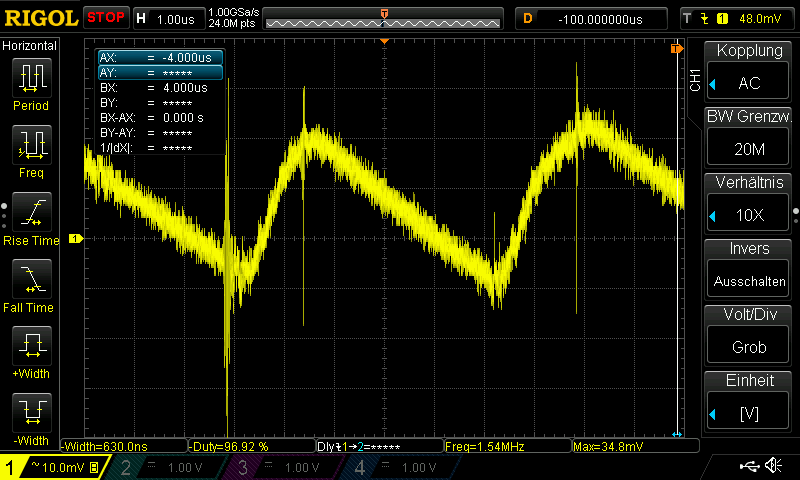
Ich habe mal GPS + Kompass an die interne +5V angeschlossen. Wenn man direkt am AUAV einen LC Filter anlötet sieht das schon deutlich besser aus.
Ich habe eine SMD Spule mit 47µH und einen 10µF Kerko (Low ESR) hinter die 5V gemacht und daran mein GPS + Kompass angeschlossen, damit wird die Spannung nahezu perfekt sauber.
Ich habe mal GPS + Kompass an die interne +5V angeschlossen. Wenn man direkt am AUAV einen LC Filter anlötet sieht das schon deutlich besser aus.
Ich habe eine SMD Spule mit 47µH und einen 10µF Kerko (Low ESR) hinter die 5V gemacht und daran mein GPS + Kompass angeschlossen, damit wird die Spannung nahezu perfekt sauber.
Ich habe mal GPS + Kompass an die interne +5V angeschlossen. Wenn man direkt am AUAV einen LC Filter anlötet sieht das schon deutlich besser aus.
Ich habe eine SMD Spule mit 47µH und einen 10µF Kerko (Low ESR) hinter die 5V gemacht und daran mein GPS + Kompass angeschlossen, damit wird die Spannung nahezu perfekt sauber.
Ich habe eine SMD Spule mit 47µH und einen 10µF Kerko (Low ESR) hinter die 5V gemacht und daran mein GPS + Kompass angeschlossen, damit wird die Spannung nahezu perfekt sauber.
Das ist nicht so kompliziert:
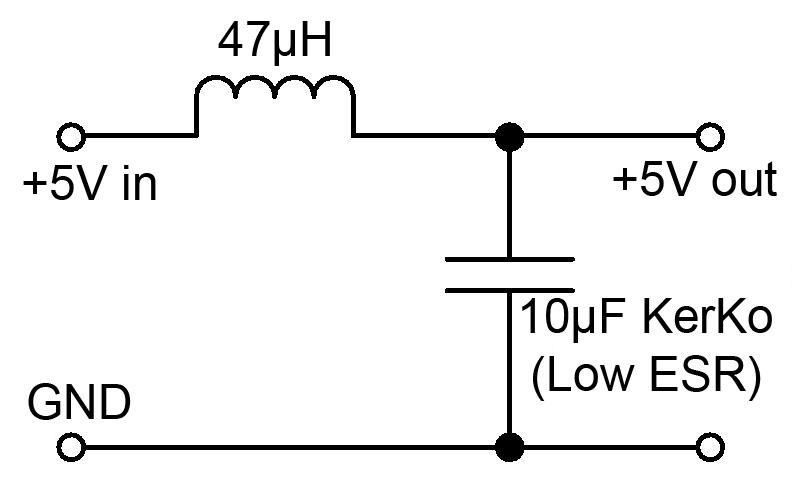
Bezugsquelle >>>Kondensator, >>>Spule Letzere gibt es für Lötkünstler auch in SMD Bauform.
@Hobby: Stimmt, einige Komponenten, wie die DroTek GNSS, oder die 3DR Telemetrie V2 kommen schon mit LC Filtern am Eingang, aber es gibt vermutlich auch solche die sich das geschenkt haben. Müßte man sich am Ausgang derer 3.3V LDO anschauen.
Bezugsquelle >>>Kondensator, >>>Spule Letzere gibt es für Lötkünstler auch in SMD Bauform.
@Hobby: Stimmt, einige Komponenten, wie die DroTek GNSS, oder die 3DR Telemetrie V2 kommen schon mit LC Filtern am Eingang, aber es gibt vermutlich auch solche die sich das geschenkt haben. Müßte man sich am Ausgang derer 3.3V LDO anschauen.
Das ist nicht so kompliziert:
Bezugsquelle >>>Kondensator, >>>Spule Letzere gibt es für Lötkünstler auch in SMD Bauform.
@Hobby: Stimmt, einige Komponenten, wie die DroTek GNSS, oder die 3DR Telemetrie V2 kommen schon mit LC Filtern am Eingang, aber es gibt vermutlich auch solche die sich das geschenkt haben. Müßte man sich am Ausgang derer 3.3V LDO anschauen.
Bezugsquelle >>>Kondensator, >>>Spule Letzere gibt es für Lötkünstler auch in SMD Bauform.
@Hobby: Stimmt, einige Komponenten, wie die DroTek GNSS, oder die 3DR Telemetrie V2 kommen schon mit LC Filtern am Eingang, aber es gibt vermutlich auch solche die sich das geschenkt haben. Müßte man sich am Ausgang derer 3.3V LDO anschauen.
...suppi gervais, muchos gracias Du bist mein Held!
o.k., den GNSS bekomm ich ja auch. Aber wie sieht es mit den 3DR Clonen aus? ... Haben die auch schon LC-Filter dabei?
Zuletzt bearbeitet:
Kann ich nicht sagen. Ich habe keinen 3DR V1 Telemetry Clone. Die übliche Schraddel V1 Telemetry steht bei mir wg. der Störungen beim Groundmodul durch den Onboard FTDi ohnehin auf meiner schwarzen Liste. (Teile, die ich nie wieder kaufe)
....hab kein Platz... Übrigens, ist es problematisch, dieses Modul ganz in der Nähe des Powerboards zu haben?Probiere es erst mal mit dem Clone. Du kannst mit diesem ja das original 3DR Groundmodul verwenden. Die kann man x-beliebig mischen. Und ja, ich nutze das 3DR V2 Gehäuse auch nicht. Siehe Beitrag #1 > Schrumpfschlauch drüber . Wenn mit Powerboard das Powermodul gemeint ist: Da würde ich kein V1 ohne Schirmung (Blechkappe) in die Nähe setzen.
Probiere es erst mal mit dem Clone. Du kannst mit diesem ja das original 3DR Groundmodul verwenden. Die kann man x-beliebig mischen. Und ja, ich nutze das 3DR V2 Gehäuse auch nicht. Siehe Beitrag #1 > Schrumpfschlauch drüber . Wenn mit Powerboard das Powermodul gemeint ist: Da würde ich kein V1 ohne Schirmung (Blechkappe) in die Nähe setzen.
- mach ich mal... ja ich meine das Powerboard, wo ich alle ESC und BEC's (1x12V für OSD und 2x5V) und Powermodul direkt verlötet habe. Blechkappe ?? soll die den am bestens aus Kupfer sein (Annahme) ?
