
Arducopter - Kurze Frage, Kurze Antwort
- Themenstarter Jace25
- Beginndatum
Hier ein Video von meinem Copter bei einem Flugdauertest bei böigem Wind.
So stand er 14 Min. !
http://workupload.com/file/0XCbTaEA
So stand er 14 Min. !
http://workupload.com/file/0XCbTaEA
ich klinke mich noch mal ein weil ich echt mal hilfe benötige
Ausgangspunkt soll der Kauf eines Storm32 Gimbal Controllers sein. Ich habe auf diese Seite gelesen, dass der Controller an den Pixhawk an Serial 2 angeschlossen werden kann.
Problem an diesem Serial hängt bereits mein BT Telemetrie für die Groundstation. Jetzt liegt es nahe zu sagen BT an Serial1 anklemmen. Doch leider habe ich an diesem Serial den Teensy 3.1 der mir meine Daten an die Taranis sendet.
Jetzt hatte ich verschiedene Überlegungen doch leider ohne Erfolg.
1. Teensy weg und über SPC Kabel und FRsky Ful-1 die Telemetrie machen. Bringt kein Mehrwert da immer noch Serial1 und 2 belegt ist
2. Da der Teensy vermutlich nur auf der TxD Leitung lauscht mit an Serial1 hängen und parallel dazu den BT auch an Serial1.
Der Versuch.
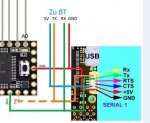
So was war zu beobachten?
Ist der Pix und die Taranis an , empfängt die Taranis z.B. den Flugmodi aber die FAS Werte (Spg. und Strom) waren null. Erst als ich BT verbunden habe zeigte er die Spannung und Strom an.
Habe dann die gestrichelte Verbindung ergänzt. Und siehe da die FAS Werte zeigte er gleich an.
Aber jetzt konnte ich über die App Tower keine Flugmodi oder Parameter mehr verändern. Es ging nur über die Taranis selber. Als würde BT über die Txd Leitung dem Pix sagen, los sende mir Daten. Das fehlt aber scheinbar dem Teensy wenn die TxD Leitung fehlt, so dass er nicht den Startschuss geben kann.
Hat jemand eine Idee wie ich den Serial 2 frei räumen kann ohne auf eine Kabellose Verbindung zum Pix zu verzichten?
Ausgangspunkt soll der Kauf eines Storm32 Gimbal Controllers sein. Ich habe auf diese Seite gelesen, dass der Controller an den Pixhawk an Serial 2 angeschlossen werden kann.
Problem an diesem Serial hängt bereits mein BT Telemetrie für die Groundstation. Jetzt liegt es nahe zu sagen BT an Serial1 anklemmen. Doch leider habe ich an diesem Serial den Teensy 3.1 der mir meine Daten an die Taranis sendet.
Jetzt hatte ich verschiedene Überlegungen doch leider ohne Erfolg.
1. Teensy weg und über SPC Kabel und FRsky Ful-1 die Telemetrie machen. Bringt kein Mehrwert da immer noch Serial1 und 2 belegt ist
2. Da der Teensy vermutlich nur auf der TxD Leitung lauscht mit an Serial1 hängen und parallel dazu den BT auch an Serial1.
Der Versuch.
So was war zu beobachten?
Ist der Pix und die Taranis an , empfängt die Taranis z.B. den Flugmodi aber die FAS Werte (Spg. und Strom) waren null. Erst als ich BT verbunden habe zeigte er die Spannung und Strom an.
Habe dann die gestrichelte Verbindung ergänzt. Und siehe da die FAS Werte zeigte er gleich an.
Aber jetzt konnte ich über die App Tower keine Flugmodi oder Parameter mehr verändern. Es ging nur über die Taranis selber. Als würde BT über die Txd Leitung dem Pix sagen, los sende mir Daten. Das fehlt aber scheinbar dem Teensy wenn die TxD Leitung fehlt, so dass er nicht den Startschuss geben kann.
Hat jemand eine Idee wie ich den Serial 2 frei räumen kann ohne auf eine Kabellose Verbindung zum Pix zu verzichten?
@robschii:
Ich bin jetzt nicht der Experte für Dein Setup, aber ich würde sagen:
1.) Die beiden TX Leitungen vom Teensy und Bluetooth Modul parallel zu schalten, funktioniert nicht - die kämpfen gegeneinander") Deshalb kannst auch nicht mehr mit Tower kommunizieren...
Deshalb kannst auch nicht mehr mit Tower kommunizieren...
2.) War das nicht so, dass der Teensy über seine TX Leitung sich die Mavlink Kommandos beim Start selber so zusammenkonfiguriert, wie er sie braucht?
3.) Könnte man nicht Teensy oder Gimbal auch auf Serial 4 legen?
Schlagt mich, wenn ich falsch liege...
Ich bin jetzt nicht der Experte für Dein Setup, aber ich würde sagen:
1.) Die beiden TX Leitungen vom Teensy und Bluetooth Modul parallel zu schalten, funktioniert nicht - die kämpfen gegeneinander
Deshalb kannst auch nicht mehr mit Tower kommunizieren...2.) War das nicht so, dass der Teensy über seine TX Leitung sich die Mavlink Kommandos beim Start selber so zusammenkonfiguriert, wie er sie braucht?
3.) Könnte man nicht Teensy oder Gimbal auch auf Serial 4 legen?
Schlagt mich, wenn ich falsch liege...
Er hat glaub nen AUAV-X2 - Jedenfalls sieht das auf dem Bild so aus. Da fällt S4 weg, welches auch erst in 3.3 (RC4) aktuell nutzbar wird (steht mal in den Rls Notes).
Ansonsten sieht das schon richtig aus. Natürlich darf das Teensy nicht senden. Ich habe auch Telemetry+Teensy an Serial1 gehabt und das funktioniert einwandfrei (Tower + Taranis)
Eventuell mal die Serial Port Parameter anpassen:
SR0_EXT_STAT: 2 # 2 hz for waypoints, GPS raw
SR0_EXTRA1: 5 # 5 hz for attitude
SR0_EXTRA2: 5 # 5 hz for VFR Hud data
SR0_EXTRA3: 3 # 3 hz for AHRS, Hardware Status
SR0_PARAMS: 10 #
SR0_POSITION: 3 # 3 hz for location data
SR0_RAW_CTRL: 0 #
SR0_RAW_SENS: 5 # 5 hz for raw imu sensor data
SR0_RAW_CHAN: 0 # no radio input or output data
Quelle hier: http://www.rcgroups.com/forums/showthread.php?t=2274401
Ansonsten sieht das schon richtig aus. Natürlich darf das Teensy nicht senden. Ich habe auch Telemetry+Teensy an Serial1 gehabt und das funktioniert einwandfrei (Tower + Taranis)
Eventuell mal die Serial Port Parameter anpassen:
SR0_EXT_STAT: 2 # 2 hz for waypoints, GPS raw
SR0_EXTRA1: 5 # 5 hz for attitude
SR0_EXTRA2: 5 # 5 hz for VFR Hud data
SR0_EXTRA3: 3 # 3 hz for AHRS, Hardware Status
SR0_PARAMS: 10 #
SR0_POSITION: 3 # 3 hz for location data
SR0_RAW_CTRL: 0 #
SR0_RAW_SENS: 5 # 5 hz for raw imu sensor data
SR0_RAW_CHAN: 0 # no radio input or output data
Quelle hier: http://www.rcgroups.com/forums/showthread.php?t=2274401
Zuletzt bearbeitet:
Er hat glaub nen AUAV-X2 - Jedenfalls sieht das auf dem Bild so aus. Da fällt S4 weg, welches auch erst in 3.3 (RC4) aktuell nutzbar wird (steht mal in den Rls Notes).
Ansonsten sieht das schon richtig aus. Natürlich darf das Teensy nicht senden. Ich habe auch Telemetry+Teensy an Serial1 gehabt und das funktioniert einwandfrei (Tower + Taranis)
Eventuell mal die Serial Port Parameter anpassen:
SR0_EXT_STAT: 2 # 2 hz for waypoints, GPS raw
SR0_EXTRA1: 5 # 5 hz for attitude
SR0_EXTRA2: 5 # 5 hz for VFR Hud data
SR0_EXTRA3: 3 # 3 hz for AHRS, Hardware Status
SR0_PARAMS: 10 #
SR0_POSITION: 3 # 3 hz for location data
SR0_RAW_CTRL: 0 #
SR0_RAW_SENS: 5 # 5 hz for raw imu sensor data
SR0_RAW_CHAN: 0 # no radio input or output data
Quelle hier: http://www.rcgroups.com/forums/showthread.php?t=2274401
Ansonsten sieht das schon richtig aus. Natürlich darf das Teensy nicht senden. Ich habe auch Telemetry+Teensy an Serial1 gehabt und das funktioniert einwandfrei (Tower + Taranis)
Eventuell mal die Serial Port Parameter anpassen:
SR0_EXT_STAT: 2 # 2 hz for waypoints, GPS raw
SR0_EXTRA1: 5 # 5 hz for attitude
SR0_EXTRA2: 5 # 5 hz for VFR Hud data
SR0_EXTRA3: 3 # 3 hz for AHRS, Hardware Status
SR0_PARAMS: 10 #
SR0_POSITION: 3 # 3 hz for location data
SR0_RAW_CTRL: 0 #
SR0_RAW_SENS: 5 # 5 hz for raw imu sensor data
SR0_RAW_CHAN: 0 # no radio input or output data
Quelle hier: http://www.rcgroups.com/forums/showthread.php?t=2274401
Hallo zusammen,
habe vor kurzem meinen ArduCopter auf V3.2.1 geupt.
Kalibration durchgeführt und via Autotune eingestellt.
Die Pid's der früheren Version( ebenfalls mit autotune) hatte ich nicht geändert!
Nun habe ich aber gelesen dass das ein Problem darstellen könnte.
Wie würdet ihr am besten vorgehen.. Pids auf Default Werte und dann Autotune oder manuell nach Kornetto- Tuning Guide einstellen.
Steh im Moment auf dem Schlauch ... komischerweise sind die Pitch an Roll Values auch nicht gelockt??! (siehe Bilder)
Danke im Voraus...
Grüße Wolfgang
habe vor kurzem meinen ArduCopter auf V3.2.1 geupt.
Kalibration durchgeführt und via Autotune eingestellt.
Die Pid's der früheren Version( ebenfalls mit autotune) hatte ich nicht geändert!
Nun habe ich aber gelesen dass das ein Problem darstellen könnte.
Wie würdet ihr am besten vorgehen.. Pids auf Default Werte und dann Autotune oder manuell nach Kornetto- Tuning Guide einstellen.
Steh im Moment auf dem Schlauch ... komischerweise sind die Pitch an Roll Values auch nicht gelockt??! (siehe Bilder)
Danke im Voraus...
Grüße Wolfgang
Anhänge
-
 171,2 KB Aufrufe: 31
171,2 KB Aufrufe: 31
Hallo,
da ich im Netz nicht's passendes gefunden habe, stelle ich hier die Frage. Habe meinen APM "normal" verbunden, also Ch1 auf Ch1, usw. Jetzt zu dem eigentlichen Problem. Es werden nur die Knüppel (Ch1-Ch4) erkannt und im Mission Planer angezeigt, der Rest geht nicht anzuwählen. Flight-Modes (Ch5) geht auch nicht. Es scheint, als wären alle anderen "tot". Wenn ich z.B. ein Servo an den "leeren" Empfänger stecke, funktioniert alles , wie es soll. Weiß nicht mehr weiter.
Gruß Fliega
da ich im Netz nicht's passendes gefunden habe, stelle ich hier die Frage. Habe meinen APM "normal" verbunden, also Ch1 auf Ch1, usw. Jetzt zu dem eigentlichen Problem. Es werden nur die Knüppel (Ch1-Ch4) erkannt und im Mission Planer angezeigt, der Rest geht nicht anzuwählen. Flight-Modes (Ch5) geht auch nicht. Es scheint, als wären alle anderen "tot". Wenn ich z.B. ein Servo an den "leeren" Empfänger stecke, funktioniert alles , wie es soll. Weiß nicht mehr weiter.
Gruß Fliega

