
OTX OpenTX Taranis Programmierung - Tips und Tricks
- Themenstarter kofferfisch
- Beginndatum
Hy,
eben und das läuft dann über die CS, da dies eine programmierbare Logik ist.
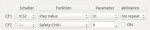
via CS1 a>x THR -95 und CS2 ein Flip-Flop realisieren und setzen, mit CS2 dann den Timer starten
und später dann mit einem Schalter oder Taster das Flip Flop wieder reseten, dann stoppt er Timer
Ablauf:
Gas auf min, dann
Gas>-95, CS1 wird aktiv,
CS2 wird mit sich selbst und CS1 verodert und damit gesetzt und bleibt ON
mit AND SH ist das so dass CS2 Freigabe hat und damit später das Reset von CS2 bewirkt.
CS2 startet jetzt den Timer 2, Gas kann jetzt beliebig sein.
mit SH wird CS2 resetet und damit Timer 2 gestoppt
Merke:
CS2 ist damit ein Flip Flop das mit CS1 gesetzt und mit SH resetet wird
Helle
eben und das läuft dann über die CS, da dies eine programmierbare Logik ist.
via CS1 a>x THR -95 und CS2 ein Flip-Flop realisieren und setzen, mit CS2 dann den Timer starten
und später dann mit einem Schalter oder Taster das Flip Flop wieder reseten, dann stoppt er Timer
Ablauf:
Gas auf min, dann
Gas>-95, CS1 wird aktiv,
CS2 wird mit sich selbst und CS1 verodert und damit gesetzt und bleibt ON
mit AND SH ist das so dass CS2 Freigabe hat und damit später das Reset von CS2 bewirkt.
CS2 startet jetzt den Timer 2, Gas kann jetzt beliebig sein.
mit SH wird CS2 resetet und damit Timer 2 gestoppt
Merke:
CS2 ist damit ein Flip Flop das mit CS1 gesetzt und mit SH resetet wird
Helle
@helle, vielen Dank für die Super Lösung des Timerproblems.
Ich sehe schon, ich muss mir die Programmiermöglichkeiten noch mal genauer anschauen. Da gibt es ja Möglichkeiten ohne Ende.
Ich sehe schon, ich muss mir die Programmiermöglichkeiten noch mal genauer anschauen. Da gibt es ja Möglichkeiten ohne Ende.
Ich habe gerade mal was ausprobiert (halt nur mal theoretisch in Companion).
Ausgangspunkt war ein Video über den Hybridmode beim Arducopter. Den gibt es noch nicht, wurde aber von Marco vorgestellt und zur Implementierung eingereicht.
Hier das Video, damit man versteht, was ich meine:
http://www.youtube.com/watch?v=06DBacyCG3c
Sinn des Hybridmodes ist es, wenn ich das richtig verstanden habe, dass vom Flugmodus Loiter auf den Flugmodus Alt Hold geschalten wird, sobald man den Stick für Roll und Nick bewegt. Loiter ist von der Steuerung sehr träge und deshalb löst man das beim Hybridmodus so, dass man kurzfristig auf Alt Hold umschaltet. Ob das mal kommt, weiß ich nicht, aber ich habe mir mal Gedanken gemacht, wie man das am Sender programmieren kann und bin dabei auf eine Lösung gekommen, die eigentlich ganz einfach ist.
Ich habe ein paar freie Schalter definiert und dann einen Mischer auf Kanal 5 für den Flugmodusschalter.
We3nn jetzt der Kanal 5 den Wert für den Flugmodus Loiter ausgibt und gleichzeitig der Steuerknüppel für Roll und Nick aus der Mitte bewegt wird, dann wird zeitverzögert vom Loitermodus in den Althold Modus geschalten. Lässt man den Knüppel los wird sofort wieder in den Loitermodus geschalten.
Sollte doch so funktionieren, oder? In der Simulation in Companion funktioniert das.
Ausgangspunkt war ein Video über den Hybridmode beim Arducopter. Den gibt es noch nicht, wurde aber von Marco vorgestellt und zur Implementierung eingereicht.
Hier das Video, damit man versteht, was ich meine:
http://www.youtube.com/watch?v=06DBacyCG3c
Sinn des Hybridmodes ist es, wenn ich das richtig verstanden habe, dass vom Flugmodus Loiter auf den Flugmodus Alt Hold geschalten wird, sobald man den Stick für Roll und Nick bewegt. Loiter ist von der Steuerung sehr träge und deshalb löst man das beim Hybridmodus so, dass man kurzfristig auf Alt Hold umschaltet. Ob das mal kommt, weiß ich nicht, aber ich habe mir mal Gedanken gemacht, wie man das am Sender programmieren kann und bin dabei auf eine Lösung gekommen, die eigentlich ganz einfach ist.
Ich habe ein paar freie Schalter definiert und dann einen Mischer auf Kanal 5 für den Flugmodusschalter.
We3nn jetzt der Kanal 5 den Wert für den Flugmodus Loiter ausgibt und gleichzeitig der Steuerknüppel für Roll und Nick aus der Mitte bewegt wird, dann wird zeitverzögert vom Loitermodus in den Althold Modus geschalten. Lässt man den Knüppel los wird sofort wieder in den Loitermodus geschalten.
Sollte doch so funktionieren, oder? In der Simulation in Companion funktioniert das.
Anhänge
-
 41,5 KB Aufrufe: 21
41,5 KB Aufrufe: 21 -
 34,2 KB Aufrufe: 22
34,2 KB Aufrufe: 22
Ich habe eine recht spezielle Frage, kann ich mit den Custom Switshes erkennen wann ein Poti z. B. S1 bewegt wird. Damit ich mit dem CS die CF mit Play Value des Potis aktivieren kann.
Also das mir immer beim drehen (mit 2sec Verzögerung oder so) der neue Wert angesagt wird.
Ich weiß das ich schon einmal selber drauf gekommen bin, nur erinnere ich mich absolut nicht mehr wie ich das damals gemacht habe.
Grüßle
Also das mir immer beim drehen (mit 2sec Verzögerung oder so) der neue Wert angesagt wird.
Ich weiß das ich schon einmal selber drauf gekommen bin, nur erinnere ich mich absolut nicht mehr wie ich das damals gemacht habe.
Grüßle

einfach geil der Thread hier, jede Stunde lernt man was neues...das steht ja alles irgendwie im Handbuch, aber Fallbeispiele mit Lösungen wie man sie hier findet, gibt es ja nur einige im Handbuch.
Helle; du machst doch das deutsche Handbuch für die Taranis?! Die Fälle die hier immer gefragt werden und du auch beantwortest könnten dort auch rein...wobei es natürlich einfacher ist hier zu fragen und auf deine Antwort zu warten
Helle; du machst doch das deutsche Handbuch für die Taranis?! Die Fälle die hier immer gefragt werden und du auch beantwortest könnten dort auch rein...wobei es natürlich einfacher ist hier zu fragen und auf deine Antwort zu warten
einfach geil der Thread hier, jede Stunde lernt man was neues...das steht ja alles irgendwie im Handbuch, aber Fallbeispiele mit Lösungen wie man sie hier findet, gibt es ja nur einige im Handbuch.
Helle; du machst doch das deutsche Handbuch für die Taranis?! Die Fälle die hier immer gefragt werden und du auch beantwortest könnten dort auch rein...wobei es natürlich einfacher ist hier zu fragen und auf deine Antwort zu warten
Helle; du machst doch das deutsche Handbuch für die Taranis?! Die Fälle die hier immer gefragt werden und du auch beantwortest könnten dort auch rein...wobei es natürlich einfacher ist hier zu fragen und auf deine Antwort zu warten
Da hat Schorse vollkommen recht!
Ja das sind alles sehr einfache Beispiele. Aber das will ich ja, ich will mein Modell selber programmieren aber dafür braucht man überhaupt erst das Wissen was die taranis/opentx so kann und wie man das umsetzt. Das sind solche Kleinigkeiten wie deltas oder TIM, die überliest man in der Anleitung oder weiß gar nicht wofür die gut sind. Ich hab früher in meiner Jugend Assembler programmiert und später auch C aber das musste man sich erst mal lernen mit kleinen "Hello world" Progrämmchen...
Hallo Taranisgemeinde,
sagen wir es anders herum. Es fehlt den meisten Taranisanwendern das "qualifizierte Nichtwissen". Dies ist ein Grundwissen, dass vorhanden sein muß um überhaupt Fragen stellen zu können. Und hier liegt wohl der Hase im Pfeffer. Bedingt durch die fast schier unendlichen Möglichkeiten die diese Software bietet. Somit werden halt noch mehr Beispiele von Nöten sein, die die Programmierung der Taranis erklären und erleichtern um sie einer großen Nutzergemeinde zugänglich zu machen.
Helle vielen Dank für die Beispiele bisher.
sagen wir es anders herum. Es fehlt den meisten Taranisanwendern das "qualifizierte Nichtwissen". Dies ist ein Grundwissen, dass vorhanden sein muß um überhaupt Fragen stellen zu können. Und hier liegt wohl der Hase im Pfeffer. Bedingt durch die fast schier unendlichen Möglichkeiten die diese Software bietet. Somit werden halt noch mehr Beispiele von Nöten sein, die die Programmierung der Taranis erklären und erleichtern um sie einer großen Nutzergemeinde zugänglich zu machen.
Helle vielen Dank für die Beispiele bisher.
Hy,
es sind im wesentliche 6 wichtige Dinge:
1. Vergiss alles von bisherigen Sendern und Herstellern mit festen Vorgaben, Kanälen, Gebern, Belegungen, Schalter, Mischer und fertigen Funktionen.
Es gibt sie nicht, alle ist mit allem überall glechberechtigt möglich.
2. Das Zentrale Element ist der Mischer, alles läuft über Mischer,
jeder Mischer ist ein Universalmischer und kann alles, es gibt keine Spezialmischer
3. Überleg dir für die Programmierung immer 3 Dinge: (EVA-Prinzip)
E: Wo kommt mein Signal her, was ist meine Signalquelle
V: Was will ich mit dem Signal wie machen, verrechnen, mischen,
A: Wo soll das Signal wie wirken, Kanal, Servo, Schalter
4. Schalter als Mischerquelle, egal ob physische oder logische Schalter
liefern von sich aus schon -100% 0% +100% bwz -100% + 100%
Schalter als Mischerschalter aktiveren/deaktiveren Mischerzeilen
R= Replace ersetzen Mischerzeile die darüber stehen.
5. Programierbare Schalter sind logische Verknüpfungen, Abfragen, Schaltungen
und Kontrollstrukturen die wieder überall wirken können.
6. Servos übersetzen nur die Mischermathematik an die reale Welt,
also die Wege und Richtungen für die Ruder.
Nie die Servos vorab einfach invertieren damit das Ruder schon richtig läuft.
Erst die Mischermatemaitk eingeben, prüfen, simulieren, dann erst an die Welt anpassen.
Alles andere ist nur Beiwerk:
Telemtrie, Ansagen, Hubi, Flugphasen, globale Variablen, Bilder, Wav-Dateien, Kurven
Lehrer/Schüler
Übe, teste und simuliere mit companion9x,
dann ist die eigentliche Bedienung des Senders ganz einfach.
Alles läuft immer gleich ab
Helle
es sind im wesentliche 6 wichtige Dinge:
1. Vergiss alles von bisherigen Sendern und Herstellern mit festen Vorgaben, Kanälen, Gebern, Belegungen, Schalter, Mischer und fertigen Funktionen.
Es gibt sie nicht, alle ist mit allem überall glechberechtigt möglich.
2. Das Zentrale Element ist der Mischer, alles läuft über Mischer,
jeder Mischer ist ein Universalmischer und kann alles, es gibt keine Spezialmischer
3. Überleg dir für die Programmierung immer 3 Dinge: (EVA-Prinzip)
E: Wo kommt mein Signal her, was ist meine Signalquelle
V: Was will ich mit dem Signal wie machen, verrechnen, mischen,
A: Wo soll das Signal wie wirken, Kanal, Servo, Schalter
4. Schalter als Mischerquelle, egal ob physische oder logische Schalter
liefern von sich aus schon -100% 0% +100% bwz -100% + 100%
Schalter als Mischerschalter aktiveren/deaktiveren Mischerzeilen
R= Replace ersetzen Mischerzeile die darüber stehen.
5. Programierbare Schalter sind logische Verknüpfungen, Abfragen, Schaltungen
und Kontrollstrukturen die wieder überall wirken können.
6. Servos übersetzen nur die Mischermathematik an die reale Welt,
also die Wege und Richtungen für die Ruder.
Nie die Servos vorab einfach invertieren damit das Ruder schon richtig läuft.
Erst die Mischermatemaitk eingeben, prüfen, simulieren, dann erst an die Welt anpassen.
Alles andere ist nur Beiwerk:
Telemtrie, Ansagen, Hubi, Flugphasen, globale Variablen, Bilder, Wav-Dateien, Kurven
Lehrer/Schüler
Übe, teste und simuliere mit companion9x,
dann ist die eigentliche Bedienung des Senders ganz einfach.
Alles läuft immer gleich ab
Helle
Zuletzt bearbeitet:
Hallo,
trotz nebligem Wetter habe ich ein Motormodell getestet und dabei ist mir folgenedes aufgefallen:
Wenn der Motorknüppel nur ein winziges Stück die untere Stellung verlassen hat, fängt schon der Timer an zu laufen
Ich hätte gern eine größere Toleranz,gekoppelt aber gleichzeitig mit dem MOTOR-AUS-Schalter SF, so daß der Timer wirklich erst
losläuft, wenn der Motor eingeschaltet ist.
Kannst Du wieder einmal helfen?
Gruß und Dank
heinrich
trotz nebligem Wetter habe ich ein Motormodell getestet und dabei ist mir folgenedes aufgefallen:
Wenn der Motorknüppel nur ein winziges Stück die untere Stellung verlassen hat, fängt schon der Timer an zu laufen
Ich hätte gern eine größere Toleranz,gekoppelt aber gleichzeitig mit dem MOTOR-AUS-Schalter SF, so daß der Timer wirklich erst
losläuft, wenn der Motor eingeschaltet ist.
Kannst Du wieder einmal helfen?
Gruß und Dank
heinrich
der Timer geht (wenn THt eingestellt ist) bei >-100 des Throttles los, d.h. natürlich nicht, dass der Motor auch startet, meist bewegt sich der Motor erst bei -80 oder so. Das ist eben nicht linear. Eine Möglichkeit wäre es einen Timer auf TH% zu stellen, dass ist dann zumindest realistisch. Aber du kannst dem Timer eigentlich jeden beliebigen Schalter (auch Custom Switche zuweisen) und dann stellst du einfach einen Schalter auf X>-95 und weist diesen dann dem Timer zu. Dann geht der erst los, wenn der Gas Kanal auf -95 steht. Ich verbinde auch explizit den Timer nicht mit dem Stick "Gas" sondern mit dem Gas-(Ausgangs-) Kanal, dann wirkt auch ein aktivierter Throttle Cut auf den Timer.
Besser wäre es natürlich gleich den Stromsensor zu verwenden. Was ich noch nicht ausprobiert habe ist z.B. den Timer erst laufen zu lassen, wenn auch ein Strom fließt. Ich hab leider kein Companion da (bin auffe Arbeit ), kann das deshalb nicht zeigen!
Besser wäre es natürlich gleich den Stromsensor zu verwenden. Was ich noch nicht ausprobiert habe ist z.B. den Timer erst laufen zu lassen, wenn auch ein Strom fließt. Ich hab leider kein Companion da (bin auffe Arbeit
), kann das deshalb nicht zeigen!
