
FRSKY Vorsicht bei "Telemetrie verloren" mit Horus
- Themenstarter Carbonator
- Beginndatum
Allgemein zu verschieden Beiträgen vorher:
Tuning macht nur bei FHH Sinn, WLANs und manche RCs arbeiten mit DSS.
Tuning ist FW Sache, das machen die Chips nicht von selbst, außer wir reden über den AFC Bereich.
Pascal hat kein automatisches sondern manuelles Tuning implementiert, aus gutem Grund.
Manuelles Tuning ist den DIY zumutbar, aber nicht einem breiten Massenmarkt ohne ein Minimum an technischem Verständnis.
Alle mir bekannten RC Hersteller (auch die teuren) verbauen Quartze, keine vorabgestimmten Oszillatoren.
Die Temperaturdrift ist gering im Vergleich zu Fertigungstoleranzen der Beschaltung und des PCBs.
RC Anlagen und Mobiltelefone sind technisch nicht vergleichbar, da sind Meilensteine dazwischen.
Tuning macht nur bei FHH Sinn, WLANs und manche RCs arbeiten mit DSS.
Tuning ist FW Sache, das machen die Chips nicht von selbst, außer wir reden über den AFC Bereich.
Pascal hat kein automatisches sondern manuelles Tuning implementiert, aus gutem Grund.
Manuelles Tuning ist den DIY zumutbar, aber nicht einem breiten Massenmarkt ohne ein Minimum an technischem Verständnis.
Alle mir bekannten RC Hersteller (auch die teuren) verbauen Quartze, keine vorabgestimmten Oszillatoren.
Die Temperaturdrift ist gering im Vergleich zu Fertigungstoleranzen der Beschaltung und des PCBs.
RC Anlagen und Mobiltelefone sind technisch nicht vergleichbar, da sind Meilensteine dazwischen.
Zuletzt bearbeitet:
Ich lese ja hier als nicht merklich Betroffener nur mit, aber mir fehlt hier eine fachliche Aussage zu Temperaturdriften von Sender und Empfängern. Die Oszillatoren werden von den Herstellern ja meist abgeglichen ausgeliefert (unter Normtemperatur), aber ich weiß z.B. nicht, ob da auch wie bei den meisten Bauelementen Aussortierungen nach verschiedenen Kriterien geliefert oder/und verbaut werden oder wurden.
Der Sender soll bei -5°C außen ebenso zuverlässig arbeiten wie im Sommer + Sonnenschein bei 40° Umgebungstemperatur, für den Empfänger kann es noch mehr Temperaturdifferenzen geben.
Inwieweit die dadurch verursachte Frequenzdrift mit zum Problem führt, wurde m.E noch nicht betrachtet.
Gruß
Der Sender soll bei -5°C außen ebenso zuverlässig arbeiten wie im Sommer + Sonnenschein bei 40° Umgebungstemperatur, für den Empfänger kann es noch mehr Temperaturdifferenzen geben.
Inwieweit die dadurch verursachte Frequenzdrift mit zum Problem führt, wurde m.E noch nicht betrachtet.
Gruß
Selbst meinen Hubsan, die Halle hab ihn selig, hat bei deutlichen minustemps und anschliessendem indoorfliegen nicht gemurrt.
Ahhhh: vielleicht gibts nur Probleme wenn mann drinnen im Wohnzimmer steht und den Hubsi draussen im Schnee fliegen lässt.... Ok, war ein Witz, wir waren beide draussen und drinnen.
😀😀😀😀😀
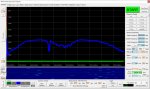
Gerade aus Kanada gekommen: Das ist ein MPM, das alle 10s um einen Klick, also 1,5kHz verstellt wird. Empfänger ist ein G-RX8, daran hängt ein Lost Frame Sensor. Man sieht den unkritischen Bereich und ab wo es mit der Link Qualität abwärts geht. Der RSSI hilft in diesem Fall nicht wirklich, rechts steigt er sogar.
Jede Sender/Empfängerkombination sollte also dieses Fenster treffen.

Jede Sender/Empfängerkombination sollte also dieses Fenster treffen.
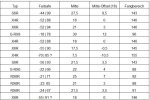
Die Nennfrequenz dürfte nach unseren Messungen bei 2404.95 liegen. Jedes MPM kann bei der Nullstellung woanders liegen. Deines liegt dann zemlich genau. Mein altes liegt bei -30 Klicks, mein neues MPM bei +9 Klicks. Jeweils gemessen gegen eine Vielzahl von Empfängern mit dem Versuch der Mittelwertbildung.
Bei diesem MPM wurde ein Offset von 18 vermutet, könnte auch 20 sein:
Bei diesem MPM wurde ein Offset von 18 vermutet, könnte auch 20 sein:
Wäre interessant zu erfahren, was ACCESS-Usern mit drei Sendern gebunden an einen RX in einem Trainermodell so passiert.
Theoretisch können ja die Fangbereiche am linken, mittleren und rechten Spektrum liegen, mit entsprechenden Problemen.
Das meine ich komplett unpolitisch 😀😀😀
PS: das tcxo fürs Hackrf ist wohl Opfer vom Coronavirus, dem neuartigen, geworden und ist unter Quarantäne. Manno
Theoretisch können ja die Fangbereiche am linken, mittleren und rechten Spektrum liegen, mit entsprechenden Problemen.
Das meine ich komplett unpolitisch 😀😀😀
PS: das tcxo fürs Hackrf ist wohl Opfer vom Coronavirus, dem neuartigen, geworden und ist unter Quarantäne. Manno
Und hier noch eine Spekulation:
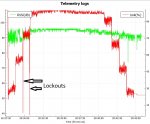
Das ist ein in Stufen verstelltes MPM. Zwei Lockouts wurden aufgezeichnet. Jeweils bei negativer Verstimmung in einen Bereich mit 20-25% Frameloss. Die Lockouts von @quax2011 im Flug waren ebenfalls bei moderaten Framelossraten. Möglicherweise auch bei negativer Frequenzlage.
Bei meinen Testflügen war ich immer nur ganz kurz in diesem moderaten Bereich und bin dann schnell Richtung Failsafe mit sehr hohen Verlusten. Aber ich hatte dort nie einen Lockout. Der Lost Frame Sensor zeigt die ja sehr eindeutig als kurze Spitze nach unten.
Und hier ist die Messung von @quax2011 Horus. Sie scheint unterhalb der Norm zu liegen.
Das ist ein in Stufen verstelltes MPM. Zwei Lockouts wurden aufgezeichnet. Jeweils bei negativer Verstimmung in einen Bereich mit 20-25% Frameloss. Die Lockouts von @quax2011 im Flug waren ebenfalls bei moderaten Framelossraten. Möglicherweise auch bei negativer Frequenzlage.
Bei meinen Testflügen war ich immer nur ganz kurz in diesem moderaten Bereich und bin dann schnell Richtung Failsafe mit sehr hohen Verlusten. Aber ich hatte dort nie einen Lockout. Der Lost Frame Sensor zeigt die ja sehr eindeutig als kurze Spitze nach unten.
Und hier ist die Messung von @quax2011 Horus. Sie scheint unterhalb der Norm zu liegen.
Ja, ist mir auch aufgefallen, aber im Log weiter oben wurde die Frequenz 200 mal verstellt. Es könnte auch sein, dass er jeweils zum Sender gelaufen ist, um umzustellen. Also z.B. Interferenzen verursacht hat. Das kann ich fragen.
Dieser Frameloss-Bereich scheint aber der gefährdete zu sein. Ich schaue ihn mir mal genauer an, vielleicht schaffe ich so meinen ersten Lockout")
Dieser Frameloss-Bereich scheint aber der gefährdete zu sein. Ich schaue ihn mir mal genauer an, vielleicht schaffe ich so meinen ersten Lockout
Anhänge
-
 83,2 KB Aufrufe: 15
83,2 KB Aufrufe: 15
Wie man liest, flackert mit 2.X die LED nicht mehr, also hat FrSky entweder das Tuning in den Griff bekommen, oder, was einfacher ist, die LED auf Dauerlicht gestellt. An der Stelle kommt @ReinhardZ mit seinem Cheatdetector Sketch ins Spiel. Da bin ich mal gespannt ....
Zuletzt bearbeitet:
Was gibt es Neues?
Ich kann immer noch keinen Lockout produzieren, so sehr ich mir Mühe gebe. Das MPM auf 75% Frameloss gestellt, läuft mein X4R völlig unbeeindruckt weiter. Interessanterweise hat, nachdem ich die X9D als Störsender dazugestellt habe, plötzlich die Telemetrie Phantasiewerte angezeigt. Ähnlich wie beim 2.0 Update. Ich versuche es jetzt mit dem G-RX8 weiter.
Ob FrSky mit 2.0 etwas an der Frequenzeinstellung gedreht hat, weil dort jetzt auch der Rückkanal abk@ckt?
Im Engel Forum sind die Obrigheitshörigen derweil damit beschäftigt Kritiker zu mobben, anstatt mal auf ihre grüne LED zu gucken.
Ich kann immer noch keinen Lockout produzieren, so sehr ich mir Mühe gebe. Das MPM auf 75% Frameloss gestellt, läuft mein X4R völlig unbeeindruckt weiter. Interessanterweise hat, nachdem ich die X9D als Störsender dazugestellt habe, plötzlich die Telemetrie Phantasiewerte angezeigt. Ähnlich wie beim 2.0 Update. Ich versuche es jetzt mit dem G-RX8 weiter.
Ob FrSky mit 2.0 etwas an der Frequenzeinstellung gedreht hat, weil dort jetzt auch der Rückkanal abk@ckt?
Im Engel Forum sind die Obrigheitshörigen derweil damit beschäftigt Kritiker zu mobben, anstatt mal auf ihre grüne LED zu gucken.
Du schnallst es nicht, oder? Die V2-Firmware ist nicht fertig und wird umgekrempelt, es macht somit
überhaupt keinen Sinn sich im Engel Forum über den aktuellen Stand andauernd zu echauffieren und
neue Jammerthreads zu starten. Diese Geheule nervt einfach nur und somit gibt es Likes wenn
dieses genervt sein mal in einem Beitrag ausgedrückt wird.
Wenn es eine "finale" Version gibt und die immer noch mängelbehaftet ist, dann kann gerne
weiter gemeckert werden, im Moment bringt das nullkommagarnichts.
überhaupt keinen Sinn sich im Engel Forum über den aktuellen Stand andauernd zu echauffieren und
neue Jammerthreads zu starten. Diese Geheule nervt einfach nur und somit gibt es Likes wenn
dieses genervt sein mal in einem Beitrag ausgedrückt wird.
Wenn es eine "finale" Version gibt und die immer noch mängelbehaftet ist, dann kann gerne
weiter gemeckert werden, im Moment bringt das nullkommagarnichts.

