
µQUAD Zeigt her eure Mini-, Micro-, Nano-Copter!
- Themenstarter maulwurfpauli
- Beginndatum

PocketRocket80
Hier meine aktuelle 🚀 für den Garten:


Der Frame kommt mit integriertem XT30 Anschluss und Stromverteiler, ideal für 4 kleine ESCs oder einen 16x16mm 4in1 ESC.
Setup:
PocketRocket80 Frame
Racerstar 1103b 10000KV Motor
Racerstar Labs 8A ESC
Super_S Betaflight F3 FC mit OSD
FrSky XM Empfänger
Modifizierte VM275t AIO Cam
Gemfan 2035BN
2s 300-450mAh LiPo
Bei sportlichem Flug im Garten kommt man auf 3-4 Minuten.
Hier meine aktuelle 🚀 für den Garten:
Der Frame kommt mit integriertem XT30 Anschluss und Stromverteiler, ideal für 4 kleine ESCs oder einen 16x16mm 4in1 ESC.
Setup:
PocketRocket80 Frame
Racerstar 1103b 10000KV Motor
Racerstar Labs 8A ESC
Super_S Betaflight F3 FC mit OSD
FrSky XM Empfänger
Modifizierte VM275t AIO Cam
Gemfan 2035BN
2s 300-450mAh LiPo
Bei sportlichem Flug im Garten kommt man auf 3-4 Minuten.

Hier meine aktuelle für den Garten:
Anhang anzeigen 168164
Der Frame kommt mit integriertem XT30 Anschluss und Stromverteiler, ideal für 4 kleine ESCs oder einen 16x16mm 4in1 ESC.
Anhang anzeigen 168164
Der Frame kommt mit integriertem XT30 Anschluss und Stromverteiler, ideal für 4 kleine ESCs oder einen 16x16mm 4in1 ESC.
")
Was wiegt denn das nackte PCB Frame? Ist interessant, dass du mit 16x16mm Elektronik angefangen hast. War deine Absicht damit bei der Elektronik Gewicht zu sparen? Oder vielleicht mit einer geringeren Masse das PCB-Frame bei Abstürzen weniger zu belasten? Wie ist die Stromverteilung zu den Motoren ausgelegt, wenn man anstatt vier separaten ESC auf den Armen einen 4-in-1 Regler under die FC steckt?
Ich freue mich auf jeden Fall auf einen Funktions- und Flugbericht!
Der Frame ist quasi als Erstlingswerk in Eagle entstanden.
Das reine PCB wiegt 6 Gramm. Mit Cam-Mount, M2 Abstandhaltern, Schrauben und passender XT30 Buchse 11 Gramm. Die 16x16mm (20mm aber 16mm Lochabstand) FC habe ich aus Platzgründen genommen. Eine FC mit 20mm Lochabstand würde bei der geringen Motordiagonale nur 45° gedreht reinpassen. Kommt für mich nicht infrage, da ich es vergessen würde einzustellen. Bei einem AUW von gerade einmal 70 Gramm muss es schon ein schwerer Crash sein. Habe jetzt in 2 Wochen noch keinen der 1,6mm Frames gebrochen.
Die Bilder zeigen die alte Version, hier die aktualisierte mit den Pads für einen 4in1 ESCs auf der Oberseite:

Flugbericht? PocketRocket sagt doch alles...
Hier ein kurzer DVR Ausschnitt:
[video=youtube_share;J1rDWW2ySyY]https://youtu.be/J1rDWW2ySyY[/video]
Das reine PCB wiegt 6 Gramm. Mit Cam-Mount, M2 Abstandhaltern, Schrauben und passender XT30 Buchse 11 Gramm. Die 16x16mm (20mm aber 16mm Lochabstand) FC habe ich aus Platzgründen genommen. Eine FC mit 20mm Lochabstand würde bei der geringen Motordiagonale nur 45° gedreht reinpassen. Kommt für mich nicht infrage, da ich es vergessen würde einzustellen. Bei einem AUW von gerade einmal 70 Gramm muss es schon ein schwerer Crash sein. Habe jetzt in 2 Wochen noch keinen der 1,6mm Frames gebrochen.
Die Bilder zeigen die alte Version, hier die aktualisierte mit den Pads für einen 4in1 ESCs auf der Oberseite:
Flugbericht? PocketRocket sagt doch alles...
Hier ein kurzer DVR Ausschnitt:
[video=youtube_share;J1rDWW2ySyY]https://youtu.be/J1rDWW2ySyY[/video]
Moin,
@arakon
bin jetzt nicht der "kleine hochdrehende Motor Experte" aber wenn der stärkere Motor nicht zur Entfaltung kommt dann denke ich das die Sache unterpropellered ist. Problem ist das du keinen Platz hast für grössere Props, bleibt nur mehr Steigung und/oder mehr Blatt. Beides leider nicht gut für Effizienz. Und es würde am kleineren Motor wahrscheinlich mehr wirken.
Wie misst du denn den Schub ?
Gruss Stefan
@arakon
bin jetzt nicht der "kleine hochdrehende Motor Experte"
aber wenn der stärkere Motor nicht zur Entfaltung kommt dann denke ich das die Sache unterpropellered ist. Problem ist das du keinen Platz hast für grössere Props, bleibt nur mehr Steigung und/oder mehr Blatt. Beides leider nicht gut für Effizienz. Und es würde am kleineren Motor wahrscheinlich mehr wirken.Wie misst du denn den Schub ?
Gruss Stefan
Mehr Blatt hab ich mit den 4-blatt Gemfans ja, und die Motoren werden auch gut warm, also nicht so, als würden die nicht genug belastet.
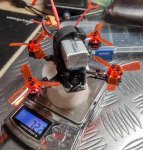
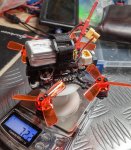
Schubmessung ist ein ganz simpler Aufbau: Eine 3D-gedruckte "Brücke" mit dem Motor drauf, Propeller als Pusher installiert (also Schub nach oben weg), und das Ding auf ne Waage geklebt und Akku durch ein Wattmeter/Ampzähler. Ist vermutlich nicht das akkurateste Teil, allerdings kann ich so zumindest innerhalb des gleichen Aufbaus Schub vergleichen, und die bisherigen Tests liegen auch nicht sooo weit weg von den Werten, die Leute mit nem großen Hebelaufbau gemessen haben.
Schubmessung ist ein ganz simpler Aufbau: Eine 3D-gedruckte "Brücke" mit dem Motor drauf, Propeller als Pusher installiert (also Schub nach oben weg), und das Ding auf ne Waage geklebt und Akku durch ein Wattmeter/Ampzähler. Ist vermutlich nicht das akkurateste Teil, allerdings kann ich so zumindest innerhalb des gleichen Aufbaus Schub vergleichen, und die bisherigen Tests liegen auch nicht sooo weit weg von den Werten, die Leute mit nem großen Hebelaufbau gemessen haben.
Was für eine Firmware packt ihr auf eure Winzlinge?
Ich habe hier vier 3Zoll Köpterchen stehen, zwei mit Inav und zwei mit Betaflight. Und irgendwie bekomme ich die Inav im Acro nicht wirklich eingestellt, habe heute 5Akkus lang rumprobiert. Geht das euch genauso? Oder hat einer von euch ein gutes PID Inav Setup für Kopter <130g Afg?
Greez Termi
Ich habe hier vier 3Zoll Köpterchen stehen, zwei mit Inav und zwei mit Betaflight. Und irgendwie bekomme ich die Inav im Acro nicht wirklich eingestellt, habe heute 5Akkus lang rumprobiert. Geht das euch genauso? Oder hat einer von euch ein gutes PID Inav Setup für Kopter <130g Afg?
Greez Termi
Diese verdammten Micros machen süchtig.
#3: Buzzer.
Kingkong 1103/7800kv Motoren, Super_S F4 Stack, Elf X2 frame, AKK BS2 Kamera, usky Receiver. Gesamtkosten ~70€ ohne Akkus. Receiver fliegt aber wieder raus, der ist zwar irre leicht und winzig, aber leider auch schon im Failsafe, wenn ich nur 2 Räume weiter gehe.
#3: Buzzer.
Kingkong 1103/7800kv Motoren, Super_S F4 Stack, Elf X2 frame, AKK BS2 Kamera, usky Receiver. Gesamtkosten ~70€ ohne Akkus. Receiver fliegt aber wieder raus, der ist zwar irre leicht und winzig, aber leider auch schon im Failsafe, wenn ich nur 2 Räume weiter gehe.
Receiver fliegt aber wieder raus hat gesagt.:
Hast du schon die Antenne ausgemessen?
Meine war keine 2cm lang, hatte auch diverse failsaves... Antenne auf 3.12cm ausgewechselt, seither etwas besser. Zwar keine Reichweitentests gemacht, sieht aber besser aus. Hatte dasselbe Problem mit den Fidhpepper FC's aus BG... zu kurze Antenne, praktisch für 5.8G....
Gruss
Gesendet von iPhone mit Tapatalk
Meine war keine 2cm lang, hatte auch diverse failsaves... Antenne auf 3.12cm ausgewechselt, seither etwas besser. Zwar keine Reichweitentests gemacht, sieht aber besser aus. Hatte dasselbe Problem mit den Fidhpepper FC's aus BG... zu kurze Antenne, praktisch für 5.8G....
Gruss
Gesendet von iPhone mit Tapatalk
Betaflight. Inav ist voll auf GPS und autonomen Flug fokusiert, es gibt echt keinen Grund, das auf nem Microcopter zu installieren.
gerade bei einem Sub 250 Gramm Kopter ohne FPV Ausstattung bieten die neuen Regeln hier Freiheiten.
Hier im Garten einer Mehrfamilienanlage, kann ich den kleinen einfach fliegen, und muß niemanden fragen,
gestört fühlt sich hier keiner.
Da ich überwiegend Freestyle auf Sicht fliege, finde ich Pos_Hold und RTH durchaus hilfreich.
Funktionieren tut es,
ob man es braucht, muß wohl jeder selbst entscheiden.
Anhänge
-
 1,8 MB Aufrufe: 271
1,8 MB Aufrufe: 271
Zuletzt bearbeitet:


