
µQUAD Zeigt her eure Mini-, Micro-, Nano-Copter!
- Themenstarter maulwurfpauli
- Beginndatum
Ein 2pol Innrunner muß halt 6x weniger pro Motorumdrehung ummagnetisieren. Zudem haben die Corlessmotoren und brushless InrunnerMotoren ja auch nicht ein mal Statorbleche. Das macht bei so hohen Drehzahlen warscheinlich ne Menge aus.
Ich würde es an den Outrunnern mal mit mehr Propsteigung versuchen. Das reduziert die Motordrehzahl. Man darf es aber mit der Propsteigung auch nicht übertreiben, denn dann wirkt man selbst das deutlich höheren Drehmoment eines Outrunners sehr schnell ab (Outrunner wird heiß).
Bei so hohen Propdrehzahlen hat ein Outrunner halt nur noch ein sehr schmalen Drehzahlbereich, wo er noch einigermaßen effektiv arbeitet. Outrunner sind eher auf Drehmoment optimiert, alber leider nicht bei hohen Drehzahlen, die ein sehr Kleiner Prop nun halt mal braucht.
Ich könnte mir ja vorstellen, das ein brushless Inrunner(meist nur zwei Magneten) eigendlich besser geeignet wäre für so kleine Props, auch wenn er letztlich nur deutlich weniger Drehmoment erzeugen kann als ein Outrunner.
Mangelst eines brauchbaRen Frame, den relativ hohen Preisen und Gewicht bei kleinen Inrunner, und dem Fehlen von brauchbaren Propmitnehmern für kleine Inrunner, hab ich das noch nie wirklich testen können.
Ich würde es an den Outrunnern mal mit mehr Propsteigung versuchen. Das reduziert die Motordrehzahl. Man darf es aber mit der Propsteigung auch nicht übertreiben, denn dann wirkt man selbst das deutlich höheren Drehmoment eines Outrunners sehr schnell ab (Outrunner wird heiß).
Bei so hohen Propdrehzahlen hat ein Outrunner halt nur noch ein sehr schmalen Drehzahlbereich, wo er noch einigermaßen effektiv arbeitet. Outrunner sind eher auf Drehmoment optimiert, alber leider nicht bei hohen Drehzahlen, die ein sehr Kleiner Prop nun halt mal braucht.
Ich könnte mir ja vorstellen, das ein brushless Inrunner(meist nur zwei Magneten) eigendlich besser geeignet wäre für so kleine Props, auch wenn er letztlich nur deutlich weniger Drehmoment erzeugen kann als ein Outrunner.
Mangelst eines brauchbaRen Frame, den relativ hohen Preisen und Gewicht bei kleinen Inrunner, und dem Fehlen von brauchbaren Propmitnehmern für kleine Inrunner, hab ich das noch nie wirklich testen können.
Viel hängt bei den Propdrehzahlen auch vom Prop selber ab. Aber das kennst du bestimmt auch schon von den brushed Coptern her. Da funktionieren ja die nur ein zehntel dünnere orginal Hubsan Props deutlich effektiver als die dickeren ChinaClone mit den kleinem Buchstaben drauf. Welche Props verwendest du auf deinen Outrunnern? Auf deinen Fotos schauen die auch so aus, mals währen die eher von der dicker Sorte. Solche dicken Props übertragen die Motorleistung zwar spontaner in die Luft, arbeiten aber auch deutlich uneffektiver. Den Unterschied kenn man ja auch schon bei 8zoll Props.
So nachdem der-Frickler in Post #1801 seinen X4 vorgestellt hatte, wollte ich unbedingt auch einen simplen Eigenbauframe haben.
Beim Zusammentragen der Teile kam mir die Idee das ganze dann doch etwas mehr auszureizen und einen X5 unter 250g AUW zu bauen.
Frame: 10x10 CFK Rechteckprofile 210mm Motorenabstand
Motoren: 4x AMAX 1806 2700kv (lt. Beschreibung 18g -> mit den benötigten Kabellängen ca. 22g)
FC+ESC: 25A Tower HGLRC
Lipo: 850 mhA 4s nano-tech
Cam: eine mini AIO mit 2g -> die baue ich heute Abend ein, hatte gestern Nacht keinen Bock mehr")
AUW ohne Cam 244g mit Cam 247g
Wenn ich den Turmaufbau noch weg lasse, könnte ich nochmals ca. 7g sparen, dann sind allerdings meine "schwäbischen Hausfrauenkünste" ausgeschöpft ....
Gruss
Bernhard




Beim Zusammentragen der Teile kam mir die Idee das ganze dann doch etwas mehr auszureizen und einen X5 unter 250g AUW zu bauen.
Frame: 10x10 CFK Rechteckprofile 210mm Motorenabstand
Motoren: 4x AMAX 1806 2700kv (lt. Beschreibung 18g -> mit den benötigten Kabellängen ca. 22g)
FC+ESC: 25A Tower HGLRC
Lipo: 850 mhA 4s nano-tech
Cam: eine mini AIO mit 2g -> die baue ich heute Abend ein, hatte gestern Nacht keinen Bock mehr
AUW ohne Cam 244g mit Cam 247g
Wenn ich den Turmaufbau noch weg lasse, könnte ich nochmals ca. 7g sparen, dann sind allerdings meine "schwäbischen Hausfrauenkünste" ausgeschöpft
....Gruss
Bernhard
Klasse!
Geht der 1806er an 5" besser als die 1407er Brotherhobby an 4"?
Geht der 1806er an 5" besser als die 1407er Brotherhobby an 4"?
Hmmm ich hab 1407 nur von RS da und laut Amax sollten die 1806er etwas mehr Thrust haben.
Allerdings ist Papier ja geduldig
Da es mit den 1806ern bezüglich AUW doch gut geklappt hat (ohne Lipostrips usw...) versuche ich nochmal mein Glück mit sehr leichten 2204 ern und einem noch etwas leichteren Rahmen (falls ich das hinbekomme).
Ohne Topdeck sollten die 2204er jetzt schon drauf gehen ....

Moin, da bin ich ja mal gespannt.
Da ich mich auch mal an einem leichten 4" versuchen will. Ich habe noch 1806 Dys da, allerdings nur 2300kv. Hmm da wären ja 5S interessant, aber die sind ja auch wieder schwerer, ob sich das ausgeht ? Effizienz sollte allerdings besser sein.
Ich habe auch noch sehr leichte 2203 Motoren aber mit 1450kv bin ich wieder bei 5 oder 6s bei 4 oder 5".
Ich wollte auch schon 1806 mit 2800 KV bestellen aber schwanke eben auch noch ob nich 1407 ~3500kv besser wären. Ein Teufelskreis ;-)
Gruss Stefan
Da ich mich auch mal an einem leichten 4" versuchen will. Ich habe noch 1806 Dys da, allerdings nur 2300kv. Hmm da wären ja 5S interessant, aber die sind ja auch wieder schwerer, ob sich das ausgeht ? Effizienz sollte allerdings besser sein.
Ich habe auch noch sehr leichte 2203 Motoren aber mit 1450kv bin ich wieder bei 5 oder 6s bei 4 oder 5".
Ich wollte auch schon 1806 mit 2800 KV bestellen aber schwanke eben auch noch ob nich 1407 ~3500kv besser wären. Ein Teufelskreis ;-)
Gruss Stefan
Ich nutze momentan Walkera QR Ladybird-Z-01 Propeller.
https://www.parrot.com/de/ersatzteile/minidrones/4x-propeller-airborne-hydrofoil
http://www.hubsan.com/na/index.php?...ducts_id=466&zenid=1vlehfudsqu1citijqoch5knq3
Gerade die größeren parrot Props sollten die Propdrehzahl etwas senken (Outrunner arbeitet effektiver) und das größere Drehmoment der brushless Outrunner besser zur Geltung bringen(mehr Schub erzeugen). Beide Props haben dünnen Flügelquerschnitt, und das macht gerade bei höheren Propdrehzahlen viel aus.
Moin, da bin ich ja mal gespannt.
Da ich mich auch mal an einem leichten 4" versuchen will. Ich habe noch 1806 Dys da, allerdings nur 2300kv. Hmm da wären ja 5S interessant, aber die sind ja auch wieder schwerer, ob sich das ausgeht ? Effizienz sollte allerdings besser sein.
Ich habe auch noch sehr leichte 2203 Motoren aber mit 1450kv bin ich wieder bei 5 oder 6s bei 4 oder 5".
Ich wollte auch schon 1806 mit 2800 KV bestellen aber schwanke eben auch noch ob nich 1407 ~3500kv besser wären. Ein Teufelskreis ;-)
Gruss Stefan
Da ich mich auch mal an einem leichten 4" versuchen will. Ich habe noch 1806 Dys da, allerdings nur 2300kv. Hmm da wären ja 5S interessant, aber die sind ja auch wieder schwerer, ob sich das ausgeht ? Effizienz sollte allerdings besser sein.
Ich habe auch noch sehr leichte 2203 Motoren aber mit 1450kv bin ich wieder bei 5 oder 6s bei 4 oder 5".
Ich wollte auch schon 1806 mit 2800 KV bestellen aber schwanke eben auch noch ob nich 1407 ~3500kv besser wären. Ein Teufelskreis ;-)
Gruss Stefan
Bei einem leichten 4" oder 5" Rahmen würde ich COBRA CP1407-3500KV nehmen.
Dann hast du sehr viel mehr Luft für eine anständige FPV Ausrüstung / 4s Lipos. Bei meinem aktuellen leichten 5" muss ich mich entscheiden entweder AIO Cam und einen nanotech 850mah 4s oder ohne CAM und dann einen 850mah 4s Graphene. Klar könnte man den Graphene noch etwas runterstrippen .... das mag ich allerdings nicht, wenns nicht zwingend erforderlich ist.
Zuletzt bearbeitet:
Hoffentlich finales Update für meinen Shrieker.
20x20 Turm (HakRC 15A 4in1 ESC, myrcmart F3 OSD FC, HLGRC TX20 Sender, XM+) unter der Runcam Split. Runcam hängt an 20mm Aluminium Bolzen die zwischen FC Vibrationsdämpfern hängen, sollte dem Jello abhelfen.
AUW mit 3S bei 242.9g, 4S-fähig.
Alle Teile, die ich selbst designed habe, hier:
https://www.thingiverse.com/Arakon/designs/page:1


20x20 Turm (HakRC 15A 4in1 ESC, myrcmart F3 OSD FC, HLGRC TX20 Sender, XM+) unter der Runcam Split. Runcam hängt an 20mm Aluminium Bolzen die zwischen FC Vibrationsdämpfern hängen, sollte dem Jello abhelfen.
AUW mit 3S bei 242.9g, 4S-fähig.
Alle Teile, die ich selbst designed habe, hier:
https://www.thingiverse.com/Arakon/designs/page:1
So, mit den 0703 Motoren war ich ja nicht so begeistert, daher habe ich meinen kleinen Brushless auf 0705/15000kv umgebaut. Ist schon besser, aber noch lange nicht gut.
Zum Vergleich:
0703: ca 3min Flugzeit
0705: ca 5,5 min Flugzeit
8,5mm Brushed ca 7 min.
Dazu muss gesagt werden, das der Brushed einen gedruckten Frame hat und ca 12g mehr wiegt.
Jeweils mit Turnigy Nano-Tech 1S 750mAh Lipo geflogen.
Dazu kommt, das die 0703 und 0705er Motoren ein massives Qualitätsproblem haben.
vom ersten Satz 0705 2 von 5 Motoren defekt
dann 0703 bestellt, 3 von 8 Motoren defekt.
und die drehenden auch einige mit unwuchten und zT massiven Geräuschen.
Werde also das Projekt 1S Brushless mit 07xx Motoren aufgeben und mal 11xx Motoren versuchen.

Zum Vergleich:
0703: ca 3min Flugzeit
0705: ca 5,5 min Flugzeit
8,5mm Brushed ca 7 min.
Dazu muss gesagt werden, das der Brushed einen gedruckten Frame hat und ca 12g mehr wiegt.
Jeweils mit Turnigy Nano-Tech 1S 750mAh Lipo geflogen.
Dazu kommt, das die 0703 und 0705er Motoren ein massives Qualitätsproblem haben.
vom ersten Satz 0705 2 von 5 Motoren defekt
dann 0703 bestellt, 3 von 8 Motoren defekt.
und die drehenden auch einige mit unwuchten und zT massiven Geräuschen.
Werde also das Projekt 1S Brushless mit 07xx Motoren aufgeben und mal 11xx Motoren versuchen.
So, mit den 0703 Motoren war ich ja nicht so begeistert, daher habe ich meinen kleinen Brushless auf 0705/15000kv umgebaut. Ist schon besser, aber noch lange nicht gut.
Zum Vergleich:
0703: ca 3min Flugzeit
0705: ca 5,5 min Flugzeit
8,5mm Brushed ca 7 min.
...
Werde also das Projekt 1S Brushless mit 07xx Motoren aufgeben und mal 11xx Motoren versuchen.
Zum Vergleich:
0703: ca 3min Flugzeit
0705: ca 5,5 min Flugzeit
8,5mm Brushed ca 7 min.
...
Werde also das Projekt 1S Brushless mit 07xx Motoren aufgeben und mal 11xx Motoren versuchen.
Mein Eindruck ist, dass auch für ein ultraleichtes 1S Projekt die 1102 und 1103 Motoren besser taugen. Die sind sowohl effizienter als auch qualitativ viel höher stehend. Höchste KV-Zahl die ich bis jetzt in der Grösse gesehen habe ist 10,000KV. Aber das geht mit längeren Propellern (2.5 oder 3-Zoll) gut.
Man könnte die 1102 und 1103 Motoren gegebenenfalls auch neu wickeln. Für höhere KV braucht es weniger Kupferwicklungen. Das heisst es ist einfacher Motoren mit hohen KV selber zu wickeln als solche mit tiefen KV, die proportional mehr Kupferwicklungen benötigen.
Hallo zusammen!
Hab das Teil zwar nicht selbst gebaut, aber bin echt erstaunt, wie gut es fliegt,der Kleine!
Warlark 85 Pro
Infos von der Hersteller:
STM32F303CCT6 main control;
MPU6500 sensor is connected by SPI way.
Double LDO;
1103 brushless motor(KV6400);
40mm 5-blade propeller of high efficiency.
The working current for each ESC on the 4in1 ESC can reach 4.5A.
Flight control board integrated with optional receiver (there are 3 kinds of hardware: A-CYRF6936;B-CC2500;C-A7105 )
Supported receiver protocols: A-DSMX/2;B-SFHSS/FRSKY;C-FLYSKY/Hubsan ( we can develop other receiver protocols according to the request of customer)
Online upgrading for the integrated receiver by GUI.
Analog video transmitter with 40 channels.
Its VTX power output is 25MW.
Online upgrading for frequency list on video transmitter.
600TVL camera of 120 degree.
20 degree adjustable for camera mounting.
Built-in buzzer.
Built-in BOOT switch (shared the switch for receiver binding)
Flight weight: 66g(including 300mAh35C2S battery)
Flight time: up to 7 minutes(500mAh7.4V)
Package includes:
1 x prebuilt Warlark Pro quad copter
4 x 40mm 5-bladePropellers (2 CW,2 CCW)
1 x 330mAh 7.4V Battery or 500mAh7.4V 25C battery
1 x Velcro
1 x charging harness
Required:
1 x Battery Charger
1 x Transmitter

Mein Testflüg:
[video=youtube;N8MB1dscaCc]https://www.youtube.com/watch?v=N8MB1dscaCc[/video]
Heute auch noch, mit vielen Flips und Rolls. Die meistert er mit Bravur =)
Hab das Teil zwar nicht selbst gebaut, aber bin echt erstaunt, wie gut es fliegt,der Kleine!
Warlark 85 Pro
Infos von der Hersteller:
STM32F303CCT6 main control;
MPU6500 sensor is connected by SPI way.
Double LDO;
1103 brushless motor(KV6400);
40mm 5-blade propeller of high efficiency.
The working current for each ESC on the 4in1 ESC can reach 4.5A.
Flight control board integrated with optional receiver (there are 3 kinds of hardware: A-CYRF6936;B-CC2500;C-A7105 )
Supported receiver protocols: A-DSMX/2;B-SFHSS/FRSKY;C-FLYSKY/Hubsan ( we can develop other receiver protocols according to the request of customer)
Online upgrading for the integrated receiver by GUI.
Analog video transmitter with 40 channels.
Its VTX power output is 25MW.
Online upgrading for frequency list on video transmitter.
600TVL camera of 120 degree.
20 degree adjustable for camera mounting.
Built-in buzzer.
Built-in BOOT switch (shared the switch for receiver binding)
Flight weight: 66g(including 300mAh35C2S battery)
Flight time: up to 7 minutes(500mAh7.4V)
Package includes:
1 x prebuilt Warlark Pro quad copter
4 x 40mm 5-bladePropellers (2 CW,2 CCW)
1 x 330mAh 7.4V Battery or 500mAh7.4V 25C battery
1 x Velcro
1 x charging harness
Required:
1 x Battery Charger
1 x Transmitter
Mein Testflüg:
[video=youtube;N8MB1dscaCc]https://www.youtube.com/watch?v=N8MB1dscaCc[/video]
Heute auch noch, mit vielen Flips und Rolls. Die meistert er mit Bravur =)
Hallo,
habe mein FlyEgg 130 geschlachtet, und die Komponenten in einen X3E (Frame) 115mm AMAXinno verpflanzt.
Leider fehlt noch der Empfänger, so das ich noch nicht testen konnte.
RunCam Splitt konnte ich wieder unterbringen, der Frame lässt sich einfach anpassen für die Cam.
Die LP der Runcam ist wieder in nem flachen gehäuse unter dem Copter.
Achsoo, Gewicht wie auf dem Bild 96Gramm
habe mein FlyEgg 130 geschlachtet, und die Komponenten in einen X3E (Frame) 115mm AMAXinno verpflanzt.
Leider fehlt noch der Empfänger, so das ich noch nicht testen konnte.
RunCam Splitt konnte ich wieder unterbringen, der Frame lässt sich einfach anpassen für die Cam.
Die LP der Runcam ist wieder in nem flachen gehäuse unter dem Copter.
Achsoo, Gewicht wie auf dem Bild 96Gramm
Anhänge
-
 391,3 KB Aufrufe: 42
391,3 KB Aufrufe: 42
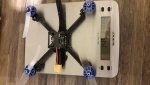
Hab nun meinen 2204er plaketenfrei fertig bekommen.
Gewicht: 145g ohne Lipo
Motoren: 4x 2204 2750kv ProtonX
Frame: X5 aus 10x10 CFK
FC+ESC: HGLRC XJB F428 Micro F4 AIO OSD BEC Flight Controller
Props: Diatone 5030
Alle Schrauben entweder M2 bzw. M3 Alu von HK
Ich glaub ne Cam baue ich da nicht mehr drauf, bleiben 5g für andere Propeller...



fertig bekommen.Gewicht: 145g ohne Lipo
Motoren: 4x 2204 2750kv ProtonX
Frame: X5 aus 10x10 CFK
FC+ESC: HGLRC XJB F428 Micro F4 AIO OSD BEC Flight Controller
Props: Diatone 5030
Alle Schrauben entweder M2 bzw. M3 Alu von HK
Ich glaub ne Cam baue ich da nicht mehr drauf, bleiben 5g für andere Propeller...
Anhänge
-
 1,5 MB Aufrufe: 43
1,5 MB Aufrufe: 43 -
 1 MB Aufrufe: 41
1 MB Aufrufe: 41 -
 1,6 MB Aufrufe: 44
1,6 MB Aufrufe: 44
Zuletzt bearbeitet:

