
AUAV-X2 - Ein echter, kompat. Mini PIXHAWK aus Bulgarien!
- Themenstarter gervais
- Beginndatum
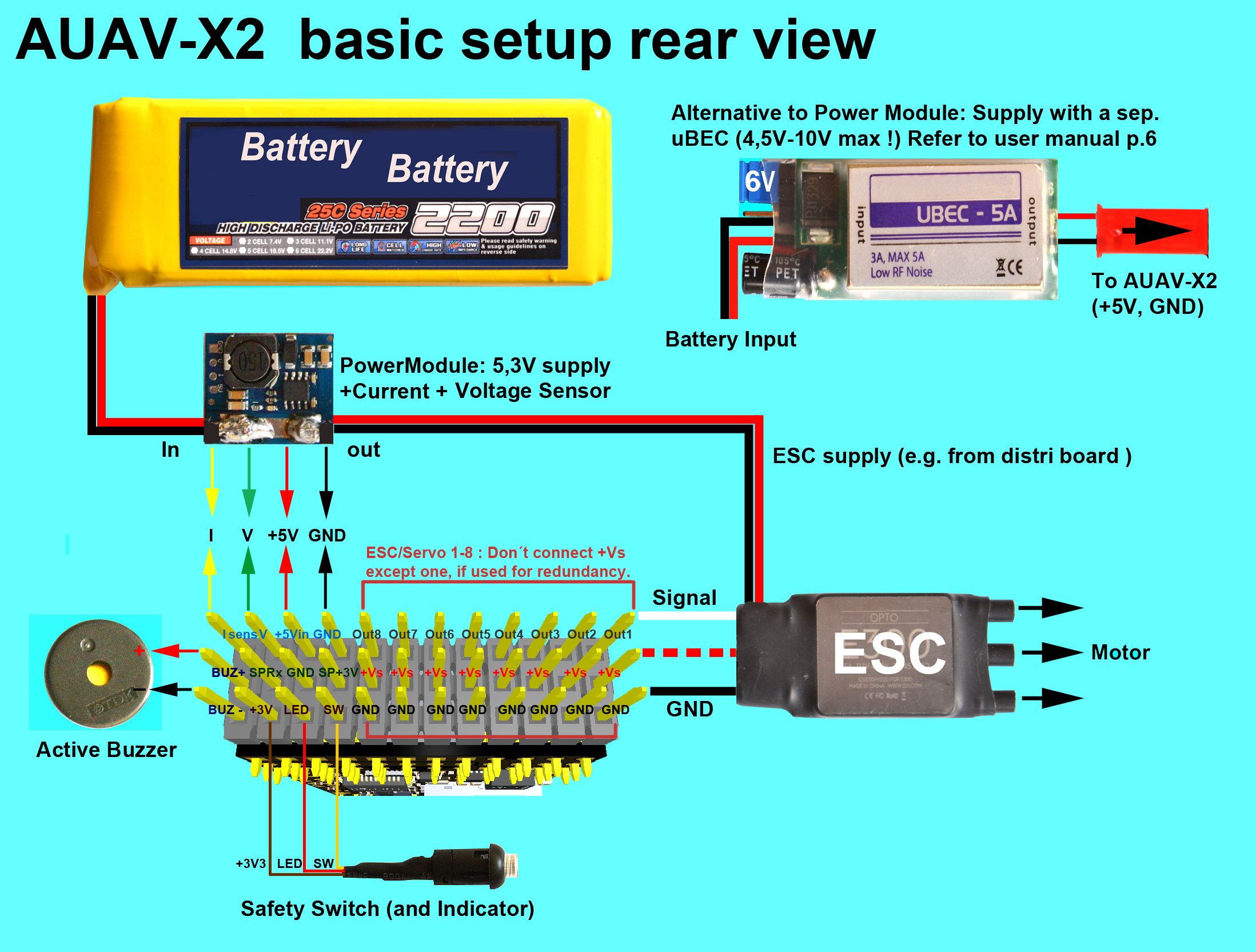
Auf der ersten Seite sind die Abbildungen von Front und Rear vertauscht. Die richtige Seite (erkennbar am SD-Kartenslot) gibt's im Manual von Nick.
http://arsovtech.com/wp-content/uploads/2015/08/AUAV-X2-user-manual-EN.pdf
Hat mich auch schon zur Verzweiflung gebracht [emoji14]
http://arsovtech.com/wp-content/uploads/2015/08/AUAV-X2-user-manual-EN.pdf
Hat mich auch schon zur Verzweiflung gebracht [emoji14]
Aber frontview und rearview ist korrekt.
Achte auf die Metallabdeckung, die den SD-Karte-Slot schützt.
Zumindest bei mir war das der Fehler; bin von der Pin-Belegung her nach der Abbildung im Thread gegangen und nix hat funktioniert. Nick hat mich dann auf den Fehler hingewiesen.
Das finde ich jetzt äußerst komisch.. Wenn ich mit dem BEC vom ESC einspeise, geht's?!
//EDIT: Liegt am Power Distribution Board. Irgendwie scheint sich da + und - mit einem Widerstand zu Brücken. Hab jetzt so wie eben geschrieben ein Regler BEC angeschlossen. Und zudem noch vom PDB die Leitungen für Spannungs- und Strommessung angeschlossen. So funktioniert jetzt alles")
Morgen nochmal alle Einstellungen überprüfen und dann hoffentlich bald fliegen... Wetter soll ja - passend jetzt wo ich soweit bin - wieder schlechter werden -.-
//EDIT: Liegt am Power Distribution Board. Irgendwie scheint sich da + und - mit einem Widerstand zu Brücken. Hab jetzt so wie eben geschrieben ein Regler BEC angeschlossen. Und zudem noch vom PDB die Leitungen für Spannungs- und Strommessung angeschlossen. So funktioniert jetzt alles
Morgen nochmal alle Einstellungen überprüfen und dann hoffentlich bald fliegen... Wetter soll ja - passend jetzt wo ich soweit bin - wieder schlechter werden -.-
Zuletzt bearbeitet:
Habe den schon mehrmals aus- und eingebaut, jedes mal mit Front view = da wo das kleine Flugzeug mit der Nase hinzeigt, Rear view = Heck des Flugzeugs. Sollte wohl auch bei dir keine Ausnahme sein
Powermodul habe ich erst gerade vor kurzem problemlos eingerichtet. Ich messe damit aber nur, keine Speisung des AUAV.
Hier wie ich es gemacht habe:
0. Voltage & Current, Other, Pixhawk auswählen im Dropdown Menu.
1. Volt eintragen wie im Video von Randy.
2. Akku frisch voll laden, anstecken und eine Runde fliegen gehen. 5-10min wars bei mir. Nicht lang rumtrödeln wenn der Akku eingesteckt ist, da das Powermodul bei tiefen Amperewerten nicht sonderlich genau ist.
3. Akku laden und auf der Anzeige des Laders schauen wie viele mAh du reingefüllt hast, sagen wir das waren 1700mAh
4. Im MP das Log runterziehen und nach maxCurrTot suchen. Sagen wir da steht 1900mAh
5. Zahl nehmen die bei Amperes per Volt steht, da ist glaube ich als Default 17 drin.
6. Neuen Faktor berechnen: 17*1700/1900 = 15.211
7. Neuen Faktor bei Amperes per Volt eintragen und speichern.
8. Fliegen und prüfen ob es stimmt, sonst die Berechnung wiederholen
Bei mir ist es so nun wirklich genau geworden!
Ich hoffe das hilft dir weiter...
Bin leider bisher nur teilweise weitergekommen: die Schritte, die Flying_Pit genannt hat haben zumindest dazu geführt, dass ich den Strom einstellen kann. Allerdings werden die Werte unter "Measured Battery Voltage" zwar übernommen, ändern sich aber wieder von selbst...und das auf einen Wert jenseits der 30V.
Ebenso hab ich mich nach folgendem Video gerichtet:
https://www.youtube.com/watch?v=tEA0Or-1n18
Hat jemand eine Idee, woran das liegen könnte?
Verwendet wird ein 4S 5200mAh Akku.
Danke schonmal!
Ebenso hab ich mich nach folgendem Video gerichtet:
https://www.youtube.com/watch?v=tEA0Or-1n18
Hat jemand eine Idee, woran das liegen könnte?
Verwendet wird ein 4S 5200mAh Akku.
Danke schonmal!
Hier wie ich es gemacht habe:
0. Voltage & Current, Other, Pixhawk auswählen im Dropdown Menu.
1. Volt eintragen wie im Video von Randy.
2. Akku frisch voll laden, anstecken und eine Runde fliegen gehen. 5-10min wars bei mir. Nicht lang rumtrödeln wenn der Akku eingesteckt ist, da das Powermodul bei tiefen Amperewerten nicht sonderlich genau ist.
3. Akku laden und auf der Anzeige des Laders schauen wie viele mAh du reingefüllt hast, sagen wir das waren 1700mAh
4. Im MP das Log runterziehen und nach maxCurrTot suchen. Sagen wir da steht 1900mAh
5. Zahl nehmen die bei Amperes per Volt steht, da ist glaube ich als Default 17 drin.
6. Neuen Faktor berechnen: 17*1700/1900 = 15.211
7. Neuen Faktor bei Amperes per Volt eintragen und speichern.
8. Fliegen und prüfen ob es stimmt, sonst die Berechnung wiederholen
Bei mir ist es so nun wirklich genau geworden!
Ich hoffe das hilft dir weiter...
Zuletzt bearbeitet:
Hallo zusammen,
ich bräuchte ein wenig Hilfe der Profis hier.
Ich habe mir einen Tarot FY690s mit Tiger MN3506 und Bulltec Opto 30A, Drotek M8N und dem X2 gebaut.
Fliegt sehr ordentlich, allerdings beim zweiten Flug wurde RTL getriggert und ich habe keine Ahnung wieso. Akku war noch voll. Empfang ebenfalls vorhanden.
Kann man mithilfe des Logfiles herausfinden warum RTL getriggert wurde?
Link zum File: https://www.dropbox.com/s/do8z3y205twxxdk/2015-10-03 11-02-41.tlog?dl=0
Weiters habe ich hin und wieder Error Compass Variance. Der externe Kompass am M8N ist mittels I2C angehängt und sollte funktionieren. Regler befinden sich außen unter den Motoren. Was könnte hier Abhilfe schaffen?
Vielen Dank für eure Hilfe im Voraus!
ich bräuchte ein wenig Hilfe der Profis hier.
Ich habe mir einen Tarot FY690s mit Tiger MN3506 und Bulltec Opto 30A, Drotek M8N und dem X2 gebaut.
Fliegt sehr ordentlich, allerdings beim zweiten Flug wurde RTL getriggert und ich habe keine Ahnung wieso. Akku war noch voll. Empfang ebenfalls vorhanden.
Kann man mithilfe des Logfiles herausfinden warum RTL getriggert wurde?
Link zum File: https://www.dropbox.com/s/do8z3y205twxxdk/2015-10-03 11-02-41.tlog?dl=0
Weiters habe ich hin und wieder Error Compass Variance. Der externe Kompass am M8N ist mittels I2C angehängt und sollte funktionieren. Regler befinden sich außen unter den Motoren. Was könnte hier Abhilfe schaffen?
Vielen Dank für eure Hilfe im Voraus!
Ein T-Log ist nicht hilfreich. Aber hier ist irgendetwas bei der Kalibrierung falsch gelaufen, oder Dein MAG ist ohne Mast montiert o. ä., temporär abgeklemmt, I²C zu lang..Offsets durch Ströme zu hoch...jedenfalls hat die MAG Abweichung über den EKF RTL getriggert. Fatal. Stell Deine Failsaves ab oder auf LAND um. Ich wiederhole mich...immer Bilder vom Aufbau einstellen. Dann muß man nicht soviel raten.
Danke schonmal.
Leider habe ich keine aussagekräftigen Fotos oder die SD Karte hier. (Copter ist 250km weg)
Mag ist auf die obere Akkuplatte des FY690s Frames montiert.
Mag Kalibrierung und Mag Motor hätte ich gemacht gehabt.
Habt ihr generell die Failsafes abgedreht? Wäre eigentlich die bessere Wahl. Man bekommt ohnehin die Infos über die Telemetrie.
Leider habe ich keine aussagekräftigen Fotos oder die SD Karte hier. (Copter ist 250km weg)
Mag ist auf die obere Akkuplatte des FY690s Frames montiert.
Mag Kalibrierung und Mag Motor hätte ich gemacht gehabt.
Habt ihr generell die Failsafes abgedreht? Wäre eigentlich die bessere Wahl. Man bekommt ohnehin die Infos über die Telemetrie.

