
iNav
- Themenstarter talentfrei
- Beginndatum
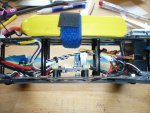
Bei meiner Resteverwertung ist zufällig ein sehr aufgeräumter Aufbau herausgekommen, ich war angenehm überrascht.
Omnibus F4proV3, ein 4-pin Pigtail von UART1 zum FPort RX, ein 6-pin Pigtail von UART6/i2c zum BN-880 für GPS und Magnetometer. Video rein/raus und die ESC. iNav 2.1.0 RC3 5"GPS Preset und nach dem Kalibrieren (Kompass musste ich draußen nochmal kalibrieren) Probeflug mit RTH und direkt danach Waypoint mit RTH, alles vom Feinsten. Das war fast ein bisschen langweilig im Vergleich zur iNav Anfangszeit")
Das iNav Telemetry flight status LUA script läuft mittlerweile auch perfekt, alle "eingerasteten" Flightmodes werden angesagt, da muss man sich auch um nix mehr kümmern.
Omnibus F4proV3, ein 4-pin Pigtail von UART1 zum FPort RX, ein 6-pin Pigtail von UART6/i2c zum BN-880 für GPS und Magnetometer. Video rein/raus und die ESC. iNav 2.1.0 RC3 5"GPS Preset und nach dem Kalibrieren (Kompass musste ich draußen nochmal kalibrieren) Probeflug mit RTH und direkt danach Waypoint mit RTH, alles vom Feinsten. Das war fast ein bisschen langweilig im Vergleich zur iNav Anfangszeit
Das iNav Telemetry flight status LUA script läuft mittlerweile auch perfekt, alle "eingerasteten" Flightmodes werden angesagt, da muss man sich auch um nix mehr kümmern.
Öhm, ich wollte mit meinem Post eigentlich eher sagen, ein blindes Huhn ... usw.
Kennst du den Fixed Wing Guide? Bau doch mal im Sender ein neues, minimalistisches Modell exakt so auf. Dann mit dem Painless Video weitermachen. Gemischt wird nur von iNav, nicht im Sender.
Kennst du den Fixed Wing Guide? Bau doch mal im Sender ein neues, minimalistisches Modell exakt so auf. Dann mit dem Painless Video weitermachen. Gemischt wird nur von iNav, nicht im Sender.
Habe das mal vor einer Weile hier im Thread beschrieben, wie ich das mache: Link zum Post
Dafür den Copter einmal mit dem PC verbunden Richtung Norden zeigen lassen und im INAV Configurator sicherstellen dass die Ausrichtung nah an 0°/360° ist. Dann nach Osten/Süden/Westen drehen und die Wirkrichtung prüfen (Osten = 90°, Süden = 180°, Westen = 270°). Dann in eine Richtung zeigend auf der Pitch- und Rollachse bewegen und schauen dass die Zahl halbwegs stabil bleibt. Wenn die Richtung verstellt ist (90°/180° Abweichung zu den Sollwerten), muss im Configuration-Tab die Kompassausrichtung entsprechend angepasst werden. Wenn beim Drehen um die Yaw-Achse der Kompass erst "mitgeht", aber beim Anhalten in die andere Richtung stark "nachkorrigiert", ist er vmtl auf dem Kopf eingebaut ("Flipped" Optionen in der Ausrichtungsauswahl). Die Ausrichtungsoptionen so lange durchprobieren bis der oben beschriebene Test komplett klappt. Dann nochmal kalibrieren (auf dem Feld, ohne Metall am Körper oder in der Nähe). Dann sollte es stabil funktionieren.
Ich wühle mich auch gerade durch die neue cli-doku
Das hier könnte passen:
disarm_kill_switch On
Disarms the motors independently of throttle value. Setting to OFF reverts to the old behaviour of disarming only when the throttle is low. Only applies when arming and disarming with an AUX channel.
Das hier könnte passen:
disarm_kill_switch On
Disarms the motors independently of throttle value. Setting to OFF reverts to the old behaviour of disarming only when the throttle is low. Only applies when arming and disarming with an AUX channel.
Nuri Omnibus F3 Spektrum Inav
Port; Uart 1oder2 ist auf seriell, Reciver & config ist alles auf Spektrum eingestellt, alles ausprobiert. Auch ne ältere Version. auch Cleanflight.
Es tut mir leid dass ich wieder zum gleichen Thema fragen muss. Als hätte ich das nicht schon vile Male getan. Als hätte ich nicht schon ne perfekte Lösung gefunden die das letzte Mal auch problemlos funktioniert hat.
Binden Empf+Sat, Bind=7, binden per F3, nochmal Empf+Sat binden -Lief!
Vormittags sah noch alles perfekt aus.
Da ich später übermütig die InavVersion aktualisiert habe, danach auch die FW des Boards, war alles wieder gelöscht.
Aber nun kann ich wieder keinen meiner SpektrumSatelliten ans Omnibus F3 binden.
Ich kann ihn an nen Empfänger anstecken und old school binden. 1.Bindeflackerlicht, 2.Fertiglicht.
Mit dem Omnibus F3 geht das nicht mehr. LED ist an
(Set spektrum_sat_bind=7 ist eingestellt, dann flackerts beim neubooten, das Licht geht aber aus, beim Bindeknopf gedrückt halten!)
Ich sehe bei keiner Einstellung dass sich die Balken bewegen.
Selbst wenn ich alles über den Bindevorgang vergessen habe müsste ich doch durch dummen Zufall bei all den Versuchen doch mal die richtige Reihenfolge erwischt haben!
Der Sat funzt, und derOmnibus hatte voeher auch funktioniert.
Ich hab auch keine zweiten F3 Omnibuse mehr mit dem ichs testen kann. (und das aufm minicopter werd ich sicher nicht anfassen)
Das einzige was mir auffällt ist dass die LED beim F3 binden ausgeht. -weis aber nicht wies früher beim erfolgreichen binden war.
Gabs da eine Möglichkeit die Einstellungen wiederabrufbar zu speichern? Vielleicht hatte ichs ja gemacht.
OK, scheinbar brauchts diesmal nur das old school binden. jetzt sehe ich bewegliche Balken. Ohne F3 bindung.
Port; Uart 1oder2 ist auf seriell, Reciver & config ist alles auf Spektrum eingestellt, alles ausprobiert. Auch ne ältere Version. auch Cleanflight.
Es tut mir leid dass ich wieder zum gleichen Thema fragen muss. Als hätte ich das nicht schon vile Male getan. Als hätte ich nicht schon ne perfekte Lösung gefunden die das letzte Mal auch problemlos funktioniert hat.
Binden Empf+Sat, Bind=7, binden per F3, nochmal Empf+Sat binden -Lief!
Vormittags sah noch alles perfekt aus.
Da ich später übermütig die InavVersion aktualisiert habe, danach auch die FW des Boards, war alles wieder gelöscht.
Aber nun kann ich wieder keinen meiner SpektrumSatelliten ans Omnibus F3 binden.
Ich kann ihn an nen Empfänger anstecken und old school binden. 1.Bindeflackerlicht, 2.Fertiglicht.
Mit dem Omnibus F3 geht das nicht mehr. LED ist an
(Set spektrum_sat_bind=7 ist eingestellt, dann flackerts beim neubooten, das Licht geht aber aus, beim Bindeknopf gedrückt halten!)
Ich sehe bei keiner Einstellung dass sich die Balken bewegen.
Selbst wenn ich alles über den Bindevorgang vergessen habe müsste ich doch durch dummen Zufall bei all den Versuchen doch mal die richtige Reihenfolge erwischt haben!
Der Sat funzt, und derOmnibus hatte voeher auch funktioniert.
Ich hab auch keine zweiten F3 Omnibuse mehr mit dem ichs testen kann. (und das aufm minicopter werd ich sicher nicht anfassen)
Das einzige was mir auffällt ist dass die LED beim F3 binden ausgeht. -weis aber nicht wies früher beim erfolgreichen binden war.
Gabs da eine Möglichkeit die Einstellungen wiederabrufbar zu speichern? Vielleicht hatte ichs ja gemacht.
OK, scheinbar brauchts diesmal nur das old school binden. jetzt sehe ich bewegliche Balken. Ohne F3 bindung.
Zuletzt bearbeitet:
Habe nachfolgendes entdeckt - rxrange:
Inav Basics – Teil 5 RX Range – Otto macht FPV
Ich habe das Problem ständig bei meiner Spektrum. Hatte es als gegeben akzeptiert. Das macht es natürlich einfacher. Kennt Ihr das oder löst Ihr das anders?
Inav Basics – Teil 5 RX Range – Otto macht FPV
Ich habe das Problem ständig bei meiner Spektrum. Hatte es als gegeben akzeptiert. Das macht es natürlich einfacher. Kennt Ihr das oder löst Ihr das anders?
Ich habe hier einen FC, der hat nur 4 Ausgänge, weil er eigentlich für Copter bestimmt ist. Ich möchte ihn für einen Flächenflieger benutzen. Ausgang 1 und 2 sind ja immer für Motor 1 und Motor 2 bestimmt. Wie kriege ich Motor 2 weg, sodass ich am Ausgang 2 ein Servo anschließen kann. Wenn ich den Mixer für den 2. Motor lösche, dann wird am Ausgang 2 ein Strick angezeigt. Er nutzt den Ausgang dann aber nicht für einen Servo. Die drei Servos liegen an den Ausgängen 3 bis 5. Aber 5 habe ich ja gar nicht.
Kann man Output 2 nicht auf Servo umstellen oder habe ich einen Denkfehler?
Kann man Output 2 nicht auf Servo umstellen oder habe ich einen Denkfehler?

